Home
Services
About us
Blog
Contacts
ArduPilot Flight Controller Software plus Mobile UX: Turn Your ArduPilot Drone Into a Product
ArduPilot Software & Mobile Apps that turn your ardupilot drone into a dependable tool. We design ground-control UX, offline maps, MAVLink integrations, RTK, video, and fleet ops for ardupilot flight controllers.

A-Bots.com Builds Your Mobile UX for ArduPilot Flight Controllers
Turn your prototype into a product. We design and ship iOS/Android ground apps and field tools that speak fluent MAVLink, configure ardupilot flight controller software, and give pilots, engineers, and operators a dependable workflow around your ardupilot drone.
What we build (scope that actually ships)
- Ground & field apps: mission authoring on mobile, pilot UI with offline maps/terrain, geofencing, Remote ID panels, health & pre-flight flows, and post-flight log viewers.
- Deep ArduPilot integrations: telemetry, parameter tuning with safe guards, ardupilot software configuration screens, dataflash log download/analysis, RTK and payload control (gimbals, sprayers, drop kits, LiDAR/altimeters).
- Fleet & ops layers: device enrollment, permissions, firmware/parameter baselines per airframe, audit history, and secure sync across teams and regions.
The technical depth you can expect
- MAVLink 2, signed where applicable: heartbeat/link supervision, SRx rate control, EKF status flags, vibration/VIBE monitoring, arming checks, failsafe surfaces (RTL/Loiter injections) exposed as readable UI.
- Parameter UX that prevents accidents: typed ranges and units from ArduPilot metadata, diff/rollback of parameter sets, per-vehicle “golden” baselines, and change approvals for field crews.
- Mission authoring that fits real terrain: corridor templates from polylines, SRTM/DEM-based profiles, terrain/surface follow toggles, fence builders, conditional triggers, and reusable “mission chunks” for repetitive jobs.
- RTK that operators actually understand: NTRIP client with clear FIX/FLOAT states, satellite views and residuals, fallback rules, camera event-mark handling (hot-shoe), PPK export for survey teams.
- Video + telemetry done right: H.264/H.265 hardware decoding (MediaCodec/AVFoundation), RTSP/UDP ingest with jitter buffers, timestamp alignment to MAVLink time, on-screen overlays (attitude, link health), recording with keyframe-aware scrubbing.
- DroneCAN / ESC telemetry: RPM/temperature feeds, servo outputs, current/voltage for power budgeting, warnings surfaced in the pilot HUD.
- Logs without the pain: fast MAVLink FTP pulls of dataflash logs, auto-decompression, parsing of GPS/EKF/IMU/VIBE, human-readable health reports, CSV/GeoJSON exports for engineering review.
- Edge AI options (when useful): on-device detection/tracking (Core ML/NNAPI/ONNX), ROI-driven gimbal cues, geo-tagged events, and conservative fail-open behaviors if models drop frames.
Reliability, safety, and compliance by design
- Offline-first sync and deterministic conflict handling; safe states if links degrade (LTE/5G, Wi-Fi, or SiK).
- Role-based controls and signed mission packages; WORM audit of critical ops.
- Release discipline: feature flags, staged rollouts, observability, crash-free SLOs that field teams can trust.
How we work with you (no fluff, clear outcomes)
- Discovery & Tech Audit: align on airframes, ardupilot flight controllers, telemetry/video paths, and regulatory constraints.
- Prototype (SITL-in-the-loop): a vertical slice—telemetry + mission + logs—running against ArduPilot SITL, then hardware.
- Pilot Deployment: selected crews, region-bounded ops, hardening, and UX polish.
- Scale & Support: SLAs, release cadence, and operator onboarding materials.
Where this adds the most value
- Teams turning an ardupilot drone into a sellable product with a branded, maintainable mobile UX.
- Programs that need ardupilot flight controller software configuration in the field—safely, with guardrails.
- Organizations combining ardupilot software with RTK, sensors, and video—and want a single, robust app instead of duct-taped tools.
Contents:
1.What Is ArduPilot (and What It Isn’t)
2.Hardware Stack: ArduPilot Flight Controllers You’ll Meet in the Field
3.Vehicle Types & Mission Profiles Supported by ArduPilot
4.Integration Fabric: From MAVLink to RTK, Sensors & Video
5.Industries & Jobs Where ArduPilot Shines
6.Two Micro-Case Studies (Concise, Outcome-First)
7.Safety, Reliability & Compliance Praxis
8.Engagement Models & Pricing Approach
9.FAQ about ArduPilot
10.Interesting facts about ArduPilot!
1.What Is ArduPilot (and What It Isn’t)
ArduPilot is autopilot software, not a single board. Think of it as a mature, open-source stack that runs across many ardupilot flight controllers and even Linux SBCs, turning raw sensors, GNSS, and actuators into stable, autonomous behavior for your ardupilot drone (and other vehicles).
What ArduPilot is
- A full flight-controller software stack. It provides sensor drivers, state estimation (EKF), control loops, flight modes, mission logic, parameter storage, and logging—everything you expect from serious ardupilot flight controller software.
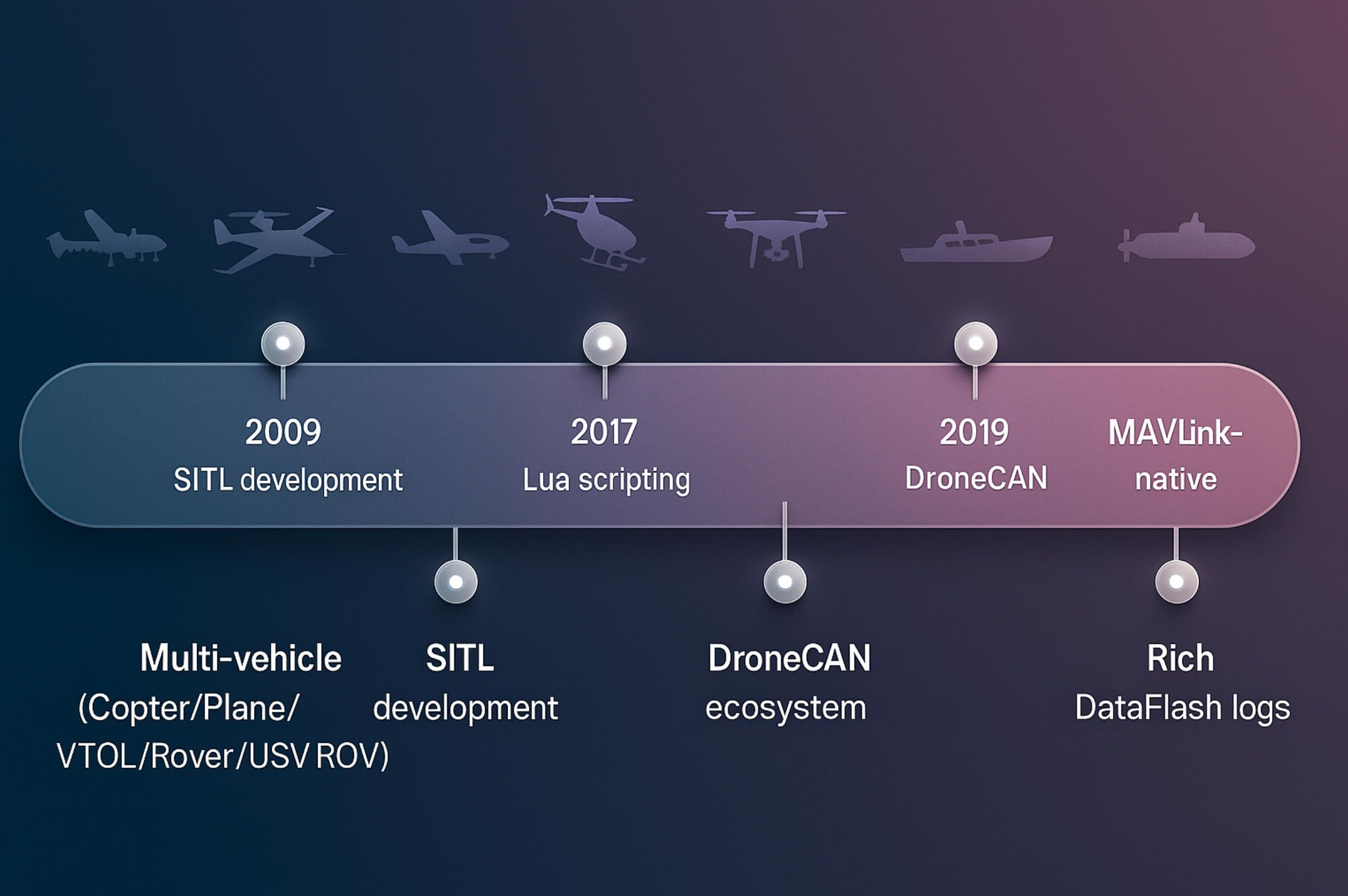
- Multi-vehicle by design. One codebase, different firmwares: Copter, Plane (incl. VTOL), Rover, Boat/USV, Sub/ROV, and AntennaTracker. Your mobile UX can target multiple vehicle types without rewriting core logic.
- Hardware-agnostic. Through a hardware abstraction layer and a large driver set, ArduPilot runs on a wide range of ardupilot flight controllers (Pixhawk-class, Cube family, Holybro, CUAV, Matek H7, etc.) and on Linux via companion boards (e.g., Raspberry Pi with a sensor/IO hat).
- MAVLink-native. Telemetry, mission upload, parameter access, and log transfers use the MAVLink protocol. That makes it straightforward to integrate with ground apps, cloud services, and your own ardupilot software tools.
- Testable before hardware. With Software-In-The-Loop (SITL) you can validate missions, autonomous modes, and your mobile UI without a live airframe. That’s crucial for product teams that need fast iteration and repeatable tests.
- Scriptable and extensible. Lua scripting and custom modules let you add behaviors (safety checks, payload triggers, UI-controlled routines) without forking the core. For peripherals on DroneCAN, AP_Periph firmware brings smart nodes (GPS/compass, airspeed, rangefinders) into the same ecosystem.
- Serious logging. DataFlash logs capture IMU, EKF, power, vibrations, GPS events, and more—fuel for health dashboards, root-cause analysis, and analytics inside your mobile app.
What ArduPilot isn’t
- Not “the board.” People often say “an ArduPilot controller,” but the board is hardware; ArduPilot is the flight controller software you flash onto that hardware.
- Not a ground control app. Mission Planner and QGroundControl are popular clients, yet they’re separate projects. If you need a branded, workflow-safe mobile app, that’s exactly what A-Bots.com builds around your ardupilot drone.
- Not a radio/video link. ArduPilot speaks over whatever transport you choose (SiK/TELEM, Wi-Fi, LTE/5G, Ethernet, serial, DroneCAN), but it isn’t itself a modem or encoder. Your link budget, QoS, and video pipeline are design choices above the autopilot layer.
- Not a compliance certificate. Geofencing, RTL, logs, and Remote ID integrations help, but regulatory compliance depends on how you integrate hardware, procedures, and software—your productization, not just the firmware.
- Not “only for quadcopters.” The same ardupilot flight controller software powers VTOLs, rovers, boats, and subs—useful if your roadmap spans multiple platforms.
Why this matters for product and mobile UX
- Stable abstractions, portable UX. Because ArduPilot normalizes sensors and modes across many ardupilot flight controllers, your mobile UI can expose the same workflows (arming checks, mission authoring, fence management, log review) across a diverse fleet.
- Predictable failure handling. ArduPilot’s mode framework (Loiter, Guided, Auto, RTL, Land, Surface/Terrain-Follow) and documented failsafes translate cleanly into UI switches, status banners, and operator prompts—key for field safety.
- Parameter discipline. Typed parameters with metadata allow safe configuration panels: ranges, units, and groupings that prevent “fat-finger” changes in the field while still giving engineers deep access when needed.
- SITL-driven development. You can design and test your mobile UX against simulated airframes and environments, then move to Hardware-in-the-Loop—shrinking risk before pilots touch a real vehicle.
A working mental model
- ArduPilot = the brain (software). You choose the airframe, sensors, radios, and a compatible board; ArduPilot fuses the data and flies it.
- Your app = the hands and eyes (UX). It talks MAVLink, visualizes health and environment, manages missions and parameters, and records evidence. Done well, this turns an ardupilot drone from a prototype into a reliable product your operators actually trust.
ArduPilot is the ardupilot flight controller software foundation. The product value emerges when you pair it with the right hardware stack and a purpose-built mobile app. That’s where A-Bots.com comes in—bridging firmware capability with operator-proof UX for real-world missions.
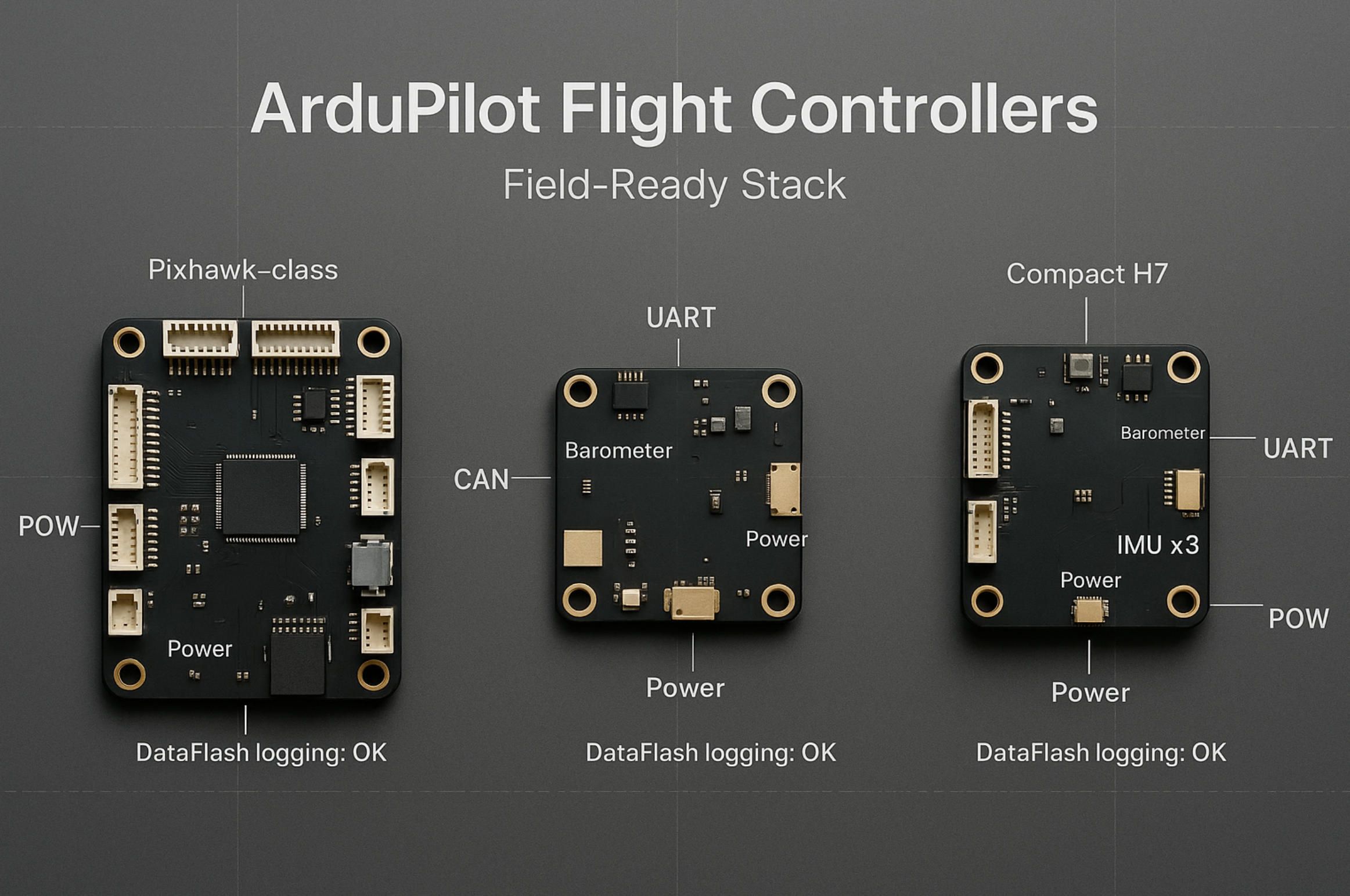
2.Hardware Stack: ArduPilot Flight Controllers You’ll Meet in the Field
When you say “ArduPilot,” you’re really talking about ardupilot flight controller software that runs on many boards. Picking the right hardware is less about brand names and more about I/O, sensor quality, redundancy, and how those choices map to your mobile UX and mission profile.
The landscape at a glance (what you’ll actually encounter)
- Pixhawk-class modular controllers. Widely supported, with clear separation of IMUs, barometer, power, and I/O. Great for professional builds that need multiple UARTs, CAN, and clean wiring. Your ardupilot drone gets predictable logs and plenty of headroom for payloads.
- Cube family (the “cube” autopilots). Known for multi-IMU redundancy and temperature-managed sensors. Useful where vibration and temperature swings are real. Your app can surface IMU lane status, failover events, and vibration metrics directly from ardupilot software.
- Holybro / CUAV / similar “integrator-friendly” boards. Solid MEMS stacks, good connectors (JST-GH), and stable power conditioning. Ideal for teams that want reliable field wiring, DroneCAN peripherals, and clean dataflash logging.
- AIO/compact boards (often H7/H743-class). Lighter and cheaper, fewer ports, sometimes a single IMU. Perfect for small airframes or rovers where you still want full ardupilot flight controller software features, but can live with less redundancy.
- Linux companion routes (e.g., SBC + I/O hat). ArduPilot can also run on Linux or pair tightly with a companion. This unlocks on-device video processing, APIs, and file systems—but demands careful power and EMI design.
What really matters when choosing a controller
- MCU headroom. H7-class MCUs leave room for Lua scripts, high-rate logging, and dense telemetry without starving control loops. Under-spec’d MCUs limit what your mobile app can query, plot, and record in real time.
- IMU & baro architecture. Dual/triple IMUs and quality barometers reduce drift and give your operators confidence. In the app, expose IMU consistency checks (vibration, clipping) so crews catch mounting issues before takeoff.
- I/O count & bus diversity. Extra UARTs mean GNSS + RTK + ADS-B + gimbal + rangefinder without ugly multiplexing. A robust CAN bus (DroneCAN) simplifies long-run peripherals and lets you add smart nodes later.
- GNSS & RTK path. If survey-grade results matter, plan for an RTK-capable receiver and a clean NTRIP flow in your app. Dual-antenna heading GNSS can replace magnetometers on high-EMI builds and yields steadier yaw on mapping VTOLs.
- Power & EMI discipline. Brownouts and noisy rails ruin missions and logs. Choose controllers with proven power isolation and add proper BEC/filters. Your UI should highlight voltage/current margins and ripple so pilots trust the airframe.
- Storage & logging. Fast, reliable DataFlash/SD logging lets you do post-flight health reports, PPK workflows, and warranty-grade evidence. If you plan analytics in the app, ensure the controller sustains high-rate log topics without drops.
- Physical form & mounting. Damped carriers, sensible connector orientation, and space for external compass/GNSS matter more than spec sheets. Good mechanics yield better EKF behavior—and fewer red banners in your mobile HUD.
Peripheral ecosystem you’ll plug in on day two
- DroneCAN smart devices. GNSS/compass, airspeed, rangefinders, and power modules that announce themselves and share diagnostics. Cleaner wiring and richer health data for your ardupilot software dashboards.
- Gimbals & cameras. PWM/serial/CAN control plus event-mark sync for mapping. Your app should show trigger state, storage remaining, and event-mark counts to de-risk survey flights.
- Range & altitude sensors. LiDAR or radar altimeters enable terrain/surface-follow UX. The app exposes min/max thresholds, confidence, and fallback behavior when readings get noisy.
- Transceivers & links. SiK, Wi-Fi, Ethernet, LTE/5G. Keep telemetry and video pipelines separated when possible; your UX can model link health (latency, drop rate) and enforce safe behavior at degraded thresholds.
- ADS-B in. Adds situational awareness overlays in your pilot map. Make it operator-usable: clear alerts, bearing, altitude delta, and practical “what now” cues.
How hardware choices shape your mobile UX (and vice versa)
- Parameter panels that respect hardware reality. The same ardupilot flight controllers expose different peripherals and limits; your app should read board IDs and enable only relevant settings, with typed ranges from ardupilot flight controller software metadata.
- Health that operators can act on. Surface EKF lanes, GPS fix types (3D/FLOAT/FIX), vibration and clipping, RC link quality, CAN node statuses, and power margins. Green/yellow/red is not enough; include thresholds and short, human text.
- Mission authoring tied to sensors. If you’ve got rangefinders and RTK, the planner can offer corridor templates with terrain- or surface-follow toggles. No RTK? Then default to conservative altitude guards and bigger geofences.
- Upgradability without chaos. Different boards will ride different firmware tracks over time. Bake in version pinning, staged rollouts, and parameter diff/rollback so field teams never “brick” a fleet mid-season.
Buying smart (a short, brutally practical checklist)
Choose the board that:
- leaves 30–50% CPU headroom in your heaviest mode,
- has enough UARTs/CAN for the peripherals you’ll add in six months,
- supports clean RTK integration if your market might demand it,
- logs fast and reliably (so your app’s analytics are trustworthy),
- mounts cleanly in your frame with sane cable runs and an external compass away from power wiring.
You don’t need the “fanciest” board—you need the right one for your mission profile and UX roadmap. Pairing the right hardware with ardupilot software and a purpose-built mobile app is what turns an ardupilot drone into a dependable product. A-Bots.com helps you pick, integrate, and surface the right signals in the UI so crews succeed on real flights.

3.Vehicle Types & Mission Profiles Supported by ArduPilot
ArduPilot isn’t just for multirotors. The same ardupilot flight controller software powers planes (incl. VTOL), rovers, boats/USVs, subs/ROVs, and even antenna trackers—giving your team one mental model and one mobile UX across many platforms. That portability is why product teams standardize on ardupilot software and then scale fleets.
Multirotor (Copter): Precision work at low altitude
Typical missions: photogrammetry grids, façade/roof inspections, thermal sweeps, site progress, waypoint patrols, target tracking.
Core modes & features: Loiter, PosHold, Guided, Auto (waypoints), RTL, Smart RTL, terrain follow, geofencing, object avoidance.
UX hooks: corridor planners from polylines, grid generators with sidelap/overlap, live RTK status, vibration (VIBE) panels, battery/state-of-health banners. In an ardupilot drone app, expose fence builders, altitude bands, and “return-to-home” reasoning so pilots always know the next safe action.

Fixed-Wing (Plane) & VTOL: Range, endurance, and corridor tasks
Typical missions: corridor mapping (powerlines, pipelines), coastal/littoral surveys, wildlife transects, long-range monitoring.
Core modes & features: FBWA/FBWB, Cruise, Auto (survey), RTL, TECS energy management, VTOL transitions (QLOITER/QHOVER/QAUTOTUNE), terrain following.
UX hooks: wind/energy overlays, transition-state indicators for VTOL, radius-of-turn visualizations, DEM-aware altitude planning, failsafe previews for link loss. ArduPilot flight controllers with dual-antenna GNSS help stabilize heading for mapping and should be surfaced in your UI.
Rover (UGV): Ground autonomy and perimeter patrol
Typical missions: yard inventory, perimeter sweeps, asset security rounds, AGV escort, RTK-staked routes.
Core modes & features: Steering/Throttle control, Guided, Auto (waypoints), object avoidance, geofencing.
UX hooks: surface-speed governors, waypoint tolerances, lane-width hints, stopline events. Your ardupilot flight controller software panels should include safe steering limits and easy dead-reckoning toggles when GNSS gets patchy.

Boat / USV: Surface follow and station-keeping
Typical missions: bathymetry lines, harbor patrol, environmental sampling, shoreline mapping.
Core modes & features: Hold/Loiter on water, Auto, Guided, surface-follow with range sensors, wind/current compensation.
UX hooks: live drift vectors, “safe speed in shallow water,” sonar/echo event marks, auto-lane spacing for repeated transects. Your ardupilot software dashboard should show heel/pitch, prop/ESC temps, and RTK FIX/FLOAT clarity for accurate depth pairing.
Sub / ROV: 3D envelopes and tether-aware navigation
Typical missions: hull/bridge pier inspection, reservoir infrastructure, underwater asset checks.
Core modes & features: Depth/Heading hold, Guided, Auto for structured paths, leak detection, tether management cues.
UX hooks: 3D waypoint visualizers, pressure-depth sanity checks, turbidity warnings, light/tilt/gimbal control. Provide operator prompts for ascent/abort envelopes and clear “safe depth” bands.
Antenna Tracker: Keep your link pointed and healthy
Typical missions: long-range flights, fixed-base surveys, field tests with directional antennas.
Core modes & features: automatic pan/tilt aiming from aircraft telemetry, home position management, slew-rate limits.
UX hooks: live antenna FOV cones on the map, “pointing quality” meters, link-budget panels. This reduces video/telemetry dropouts that would otherwise force conservative mission planning.
Mission Profiles as Design Patterns (how operators actually fly)
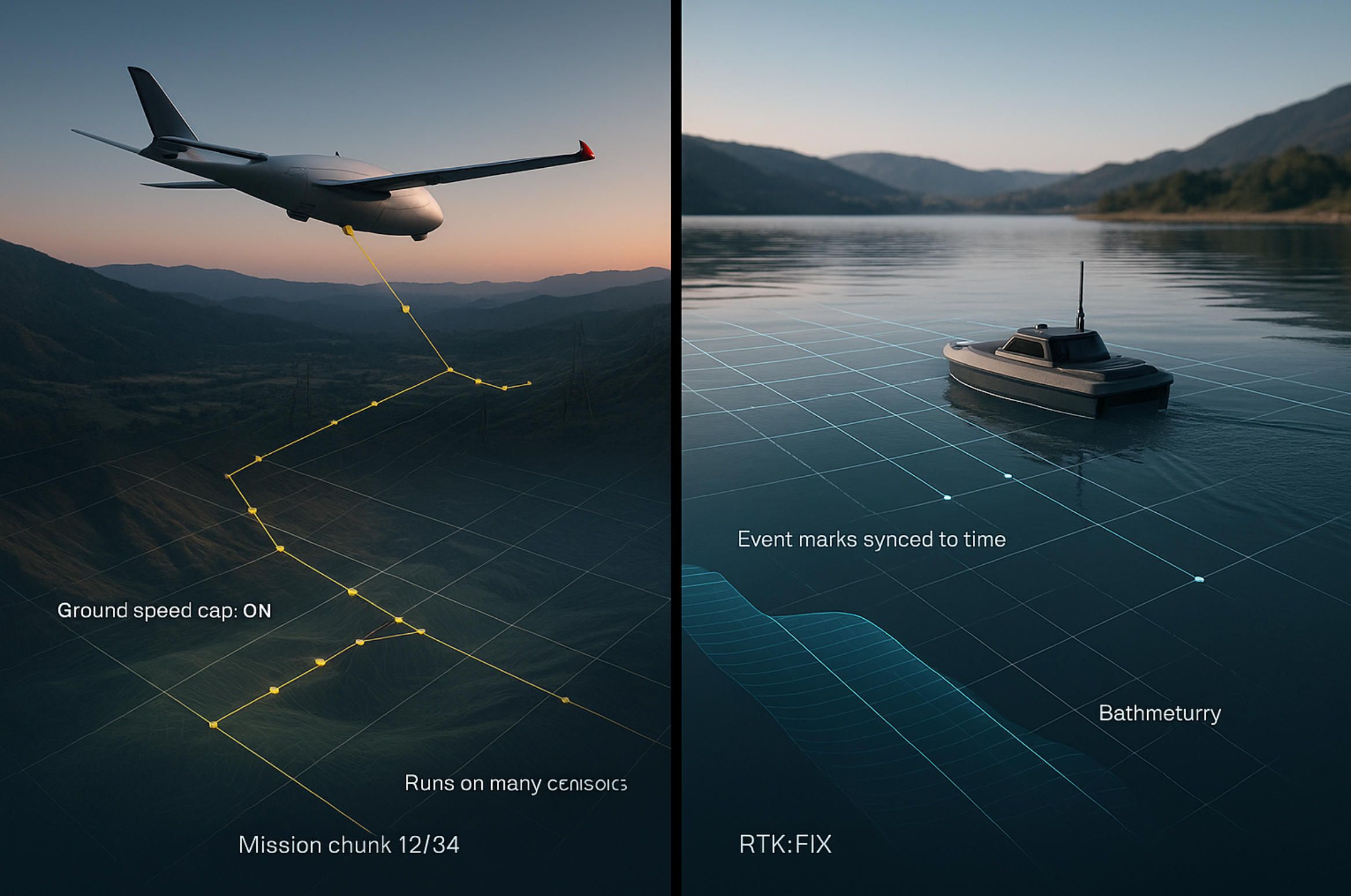
- Lawnmower Survey Grid: area mapping with defined sidelap/overlap, camera event marks, DEM-aware altitude. Mobile UX should auto-compute speed, shutter intervals, and altitude bands from GSD targets; pin RTK requirements visibly.
- Corridor Mapping: polyline-derived waypoints with terrain follow and offset lanes; wind-aware ground speed caps so the aircraft meets exposure intervals.
- Façade/Structure Inspection: vertical ribbons with standoff distance, gimbal pitch schedules, and “pause & circle” safety actions.
- Perimeter Patrol: fence-follow with dwell points and “eyes-on” camera checks; operator prompts for link-loss actions and RTL thresholds.
- Bathymetry Transects: parallel lines with event marks from the sounder; FIX/FLOAT state latched into each mark for QA.
- Search & Rescue Grid: adaptive cell sizes, on-device thermal cues (optional), positive confirmation workflow (mark/flag → notify → continue).
Each pattern lives cleanly on ardupilot flight controllers and speaks MAVLink, so one app can expose them all with shared UI components.
Safety & Failsafe Behaviors (turn firmware guarantees into operator clarity)
ArduPilot’s modes (Auto, Guided, Loiter, RTL, Land) and failsafes (battery, EKF, GPS, geofence, link loss) are dependable—if your app makes them obvious. Good ardupilot flight controller software UX shows: what triggered a failsafe, what the vehicle will do next, how to override safely, and how to prevent repeats (vibration, compass interference, brownouts). That transparency converts “black box” autopilot events into teachable moments for crews.
Why this matters for productization
By standardizing on ardupilot software, you can field a mixed fleet—multirotors for close-in detail, VTOL for corridors, USVs for waterlines—without multiplying training or maintenance burden. A purpose-built mobile app then becomes the connective tissue: the place where missions are authored, parameters are guarded, logs are harvested, and operators trust the system. That’s exactly where A-Bots.com helps: we translate firmware capabilities into an operator-proof mobile experience for any ardupilot drone you deploy.
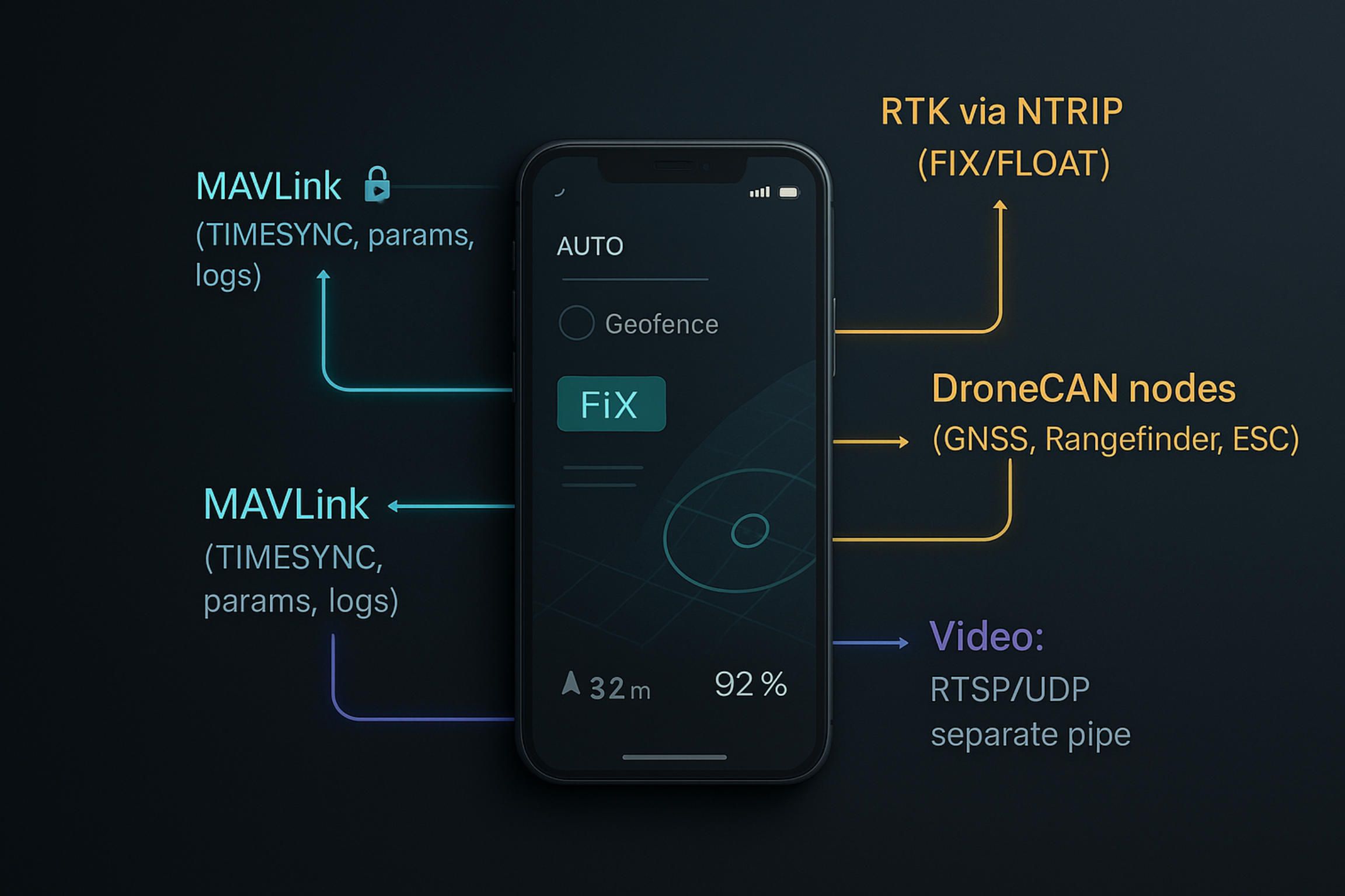
4.Integration Fabric: From MAVLink to RTK, Sensors & Video
An ArduPilot product lives or dies by the quality of its plumbing. The ardupilot software on the vehicle speaks MAVLink; your mobile app is the other end of that conversation. Treat MAVLink as a real-time contract rather than “just telemetry.” The link starts with heartbeat and mode/state chatter, but the moment you move beyond a hobby setup, you’ll care about message signing in MAVLink 2 to prevent packet injection, sensible SRx stream rates so you don’t drown LTE, and a time base you can trust. A professional app establishes TIMESYNC early, then aligns everything—attitude, GNSS fixes, camera triggers—to that clock so post-flight evidence and on-screen overlays tell the same truth.
Once the clock is stable, you need a shared notion of “where” and “which way.” For an ardupilot drone doing survey work, RTK is not a checkbox; it is an operator experience. Your app should run an NTRIP client without forcing pilots to be GNSS experts, surface FIX/FLOAT states in words a human can act on, and latch that state into each event mark so QA can prove accuracy later. In some builds, dual-antenna heading GNSS replaces the magnetometer and calms yaw in crosswinds; your UI should reflect that choice by de-emphasizing mag warnings and highlighting GNSS heading health instead. When FIX is lost, the right behavior is clarity, not panic: pin a conservative altitude band, expand fence margins, and tell the pilot exactly how the ardupilot flight controller software will behave if link or accuracy degrades.
Sensors are not an accessory rack; they are first-class citizens in the integration fabric. Rangefinders and radar altimeters unlock terrain/surface-follow modes; your mission editor should expose that promise with profiles and confidence thresholds rather than raw numbers. DroneCAN nodes (GNSS, airspeed, power modules, smart ESCs) bring richer health data and deterministic wiring—great news for mobile UX because each node announces itself with a type and serial that can feed your device enrollment and audit trails. High-rate IMU and VIBE metrics look like engineering trivia until you turn them into pre-flight insight: mounting issues and prop balance mistakes show up as clipping and FFT peaks; surface them as short, human sentences that stop a bad launch. None of this is possible if logging is an afterthought. Use MAVLink FTP to pull DataFlash logs quickly, decompress on device, and turn EKF flags, GPS innovations, and power ripples into a one-page health brief your field lead can read without a laptop.
Video deserves its own lane—always. The ardupilot flight controllers do not “do video”; a companion or payload does, which is why your transport and UI must respect separation of concerns. Keep telemetry on one socket and video on another, even when both ride the same LTE modem. RTP/RTSP or low-latency UDP with a small jitter buffer will keep glass-to-glass delay predictable; SRT or QUIC can help over contested networks, but the important part is aligning video frames with MAVLink time so overlays land on the right pixel and recorded evidence stands up to scrutiny. Adaptive bitrate looks fancy on a spec sheet; what operators actually need is a floor they can count on and an honest indicator of link health that tells them when to switch to a “sparse HUD” to save bandwidth. If you record, write keyframe-aware files that scrub correctly on mobile and stamp each clip with vehicle mode, position, and FIX/FLOAT so analysts don’t guess.
None of this matters if parameter writes can brick a fleet. The safest ardupilot flight controller software apps treat parameters as typed, versioned configuration with diffs, rollbacks, and per-airframe baselines. Read the board ID and firmware version before you draw a settings screen; hide what does not exist on that controller; enforce ranges from ArduPilot metadata; and require a second tap for changes that touch safety—like fence radii, RTL behavior, or failsafe thresholds. In mixed fleets you will eventually run multiple firmware tracks. Version-pin by hardware, roll out in stages, and prove stability with SITL before field crews ever see a new build. Operators should feel like the system is on their side: if a write fails or times out, the UI explains what is still true on-board and how to return to a known-good set.
Finally, the network itself is part of your architecture. MAVLink over UDP broadcast is fine on a bench; in the wild you’ll route and multiplex. Whether you use mavlink-router, MAVProxy, or a lean custom forwarder, design for loss and re-order rather than assuming a perfect pipe. On cellular, NAT will surprise you; prefer outbound client connections from the vehicle to a rendezvous, or from the app through a relay you control. When the pipe narrows, your app must degrade gracefully: slow the SRx rates, pause the vanity charts, keep the pilot HUD alive, and never stop sending the few messages that keep the aircraft and the operator in sync.
This is the integration fabric A-Bots.com builds around ArduPilot: a MAVLink conversation that is authenticated and time-honest, RTK that elevates accuracy without ceremony, sensors that speak in operator language, and a video path that complements—not compromises—the autopilot. Tie those threads together and your ardupilot software stops being “firmware on a board” and becomes a dependable product experience on a screen.
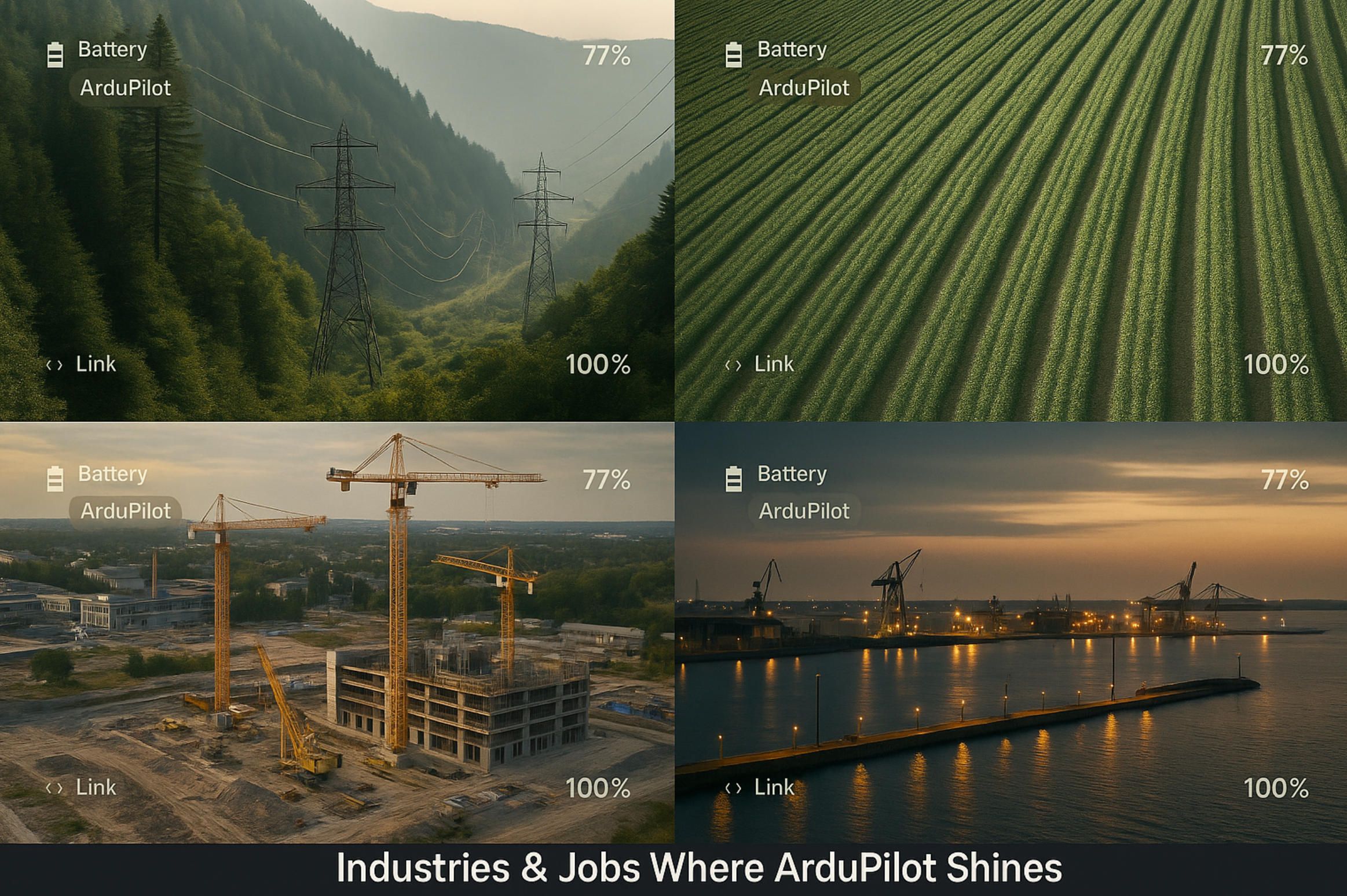
5.Industries & Jobs Where ArduPilot Shines
ArduPilot earns its keep where real work happens: long corridors of utilities, complex construction sites, river mouths, farms, harbors, warehouses. Pair ardupilot flight controller software with a purpose-built mobile UX and an ardupilot drone becomes a dependable tool that crews trust, not a science project.
Energy & Utilities. Corridor flights over powerlines and pipelines reward endurance, consistent RTK, and a calm wind model; the operator needs terrain-aware routes, live link health, and a way to annotate defects without breaking the mission flow. With ardupilot software, a VTOL can ride crosswinds, follow a polyline at a fixed standoff, trigger gimbal shots at towers, and return with DataFlash logs and camera events that your app turns into evidence, not folders of guesswork.
Agriculture. In orchards and row crops, altitude is a negotiation with the canopy. Rangefinders and radar altimeters feed surface-follow modes; RTK locks geo-events to sub-decimeter ground truth; the mobile app translates GSD targets into airspeed and shutter cadence. The same ardupilot flight controllers that map vigor one morning can fence-patrol at dusk, logging wildlife crossings and battery margins with equal discipline.
Public Safety & SAR. Search grids, thermal sweeps, and disaster overflights punish sloppy UX. A good client for ardupilot flight controller software explains, in plain language, what Auto, Guided, RTL, or a geofence trigger will do next, and lets the pilot confirm “eyes-on” marks without losing the track. Offline maps, signed mission packages, and honest FIX/FLOAT states keep command confident when the weather and spectrum are both uncooperative.
Construction & Survey. Photogrammetry lives on repeatability. Your ground app should compute corridors and grids from a design file, pin RTK requirements, and stamp every camera event with synchronized time. ArduPilot software manages the flight envelope and energy; the app makes exposure, overlap, and radius-of-turn visible so as-built checks and volumetrics reconcile on the first try.
Maritime & Inland Water. USVs and small boats are where ardupilot flight controllers quietly excel. Surface-follow, station-keeping, and drift vectors turn bathymetry lines into clean profiles; echo-sounder marks inherit the GNSS solution state; the operator sees heel, pitch, and current-compensated groundspeed without hunting. Video runs on a separate pipe, and the HUD never lies about link quality.
Warehousing, Security & Perimeter Jobs. On the ground, rovers run the same MAVLink conversation and make the same promises: predictable Auto behavior, geofences that mean what they say, and log evidence that can survive a dispute. An ardupilot drone patrols the fence while a UGV checks gates; both report to a single audit trail inside your app.
Research & Education. Labs love that ardupilot flight controller software is scriptable. New sensors come online as DroneCAN nodes, Lua adds behaviors without a fork, SITL accelerates iteration, and the mobile client can expose toggles and telemetry panels that help students learn systems thinking, not just radio sticks.
Media & Cinematography. The job is repeatability under pressure. Waypoints and gimbal schedules lock a move; geofences protect the set; on-screen overlays align attitude and time so post can trust the footage. When the DP calls for the same shot tomorrow, ardupilot software plus a clean UI obliges without superstition.
Across these domains, the pattern is the same: ArduPilot flies the vehicle; your product lives in the mobile experience. A-Bots.com builds that experience—MAVLink that’s time-honest and authenticated, RTK that operators actually understand, sensor data that speaks human, and video that complements the mission. That’s how an ardupilot drone becomes “the way we do this job,” not just “a drone we own.”
6.Two Micro-Case Studies (Concise, Outcome-First)
VTOL Corridor Inspections for Powerlines.
The brief was simple to say and hard to execute: fly long corridors in gusty valleys, keep standoff distance consistent, and bring back defensible evidence. We built a mobile mission UX around ardupilot flight controller software that treats corridor mapping as a first-class citizen: polyline-derived legs with DEM-aware terrain follow, wind-bounded ground-speed caps, and “mission chunks” that crews can reuse between spans. RTK is handled inside the app with a plain-English NTRIP client—operators see FIX/FLOAT states they can act on, not raw NMEA. Pre-flight health readouts surface EKF consistency, VIBE/clipping, and power margins from the ardupilot software telemetry so bad launches are caught on the ground. Video rides a separate pipe; camera event marks are timestamp-aligned to MAVLink time for clean post. The outcome was a repeatable inspection run that moved from “best effort” to “predictably the same”, with prep shrinking from lengthy laptop sessions to minutes on a phone, and re-flights dropping because exposure, overlap, and RTL behavior were obvious before takeoff—all on standard ardupilot flight controllers.
USV Bathymetry Kit for Shallow Reservoirs.
Shallow, weedy water punished every previous survey: GPS drift near shorelines, echo sounder spikes, and tide-like wind drift. We productized an ardupilot drone on water—a compact USV—by pairing ardupilot flight controllers with a sonar payload and a mobile client that speaks the operator’s language. Surface-follow logic uses range sensors to hold depth track; drift vectors and station-keeping are visualized directly on the map; each depth ping inherits the GNSS solution state so QA can filter anything below FIX without drama. When RTK drops to FLOAT, the app widens fence margins and pins a conservative speed band, explaining exactly how the vehicle will behave. Logs are pulled over MAVLink FTP and turned into a one-page health brief—EKF flags, GPS innovations, power ripple—so a field lead can sign off without a laptop. The practical result was clean, stitch-ready profiles collected on the first pass, operators spending time on transects instead of settings, and a kit that scales across hulls because the core is ardupilot flight controller software, not a proprietary black box.
7.Safety, Reliability & Compliance Praxis
Reliability in an ArduPilot product is not a switch you flip at the end; it’s a posture you adopt from the first test in SITL to the last field release. The ardupilot software on the vehicle gives you trustworthy primitives—flight modes, geofences, failsafes, EKF health, DataFlash logs. The job of the mobile layer is to make those primitives legible and enforceable so operators behave predictably even when links degrade, wind gusts rise, or a sensor goes noisy.
We start with time and identity, because nothing is defensible without them. A ground app that speaks MAVLink 2 negotiates message signing where appropriate and establishes a stable time base via TIMESYNC before it draws a single overlay. Every event—arming, mode change, mission item reached, camera trigger, fence breach—is stamped to that clock and bound to a vehicle identity that the app can prove. When you later review a mission, the ardupilot flight controller software logs and the mobile recording tell the same story down to the second, which matters for internal QA and any external inquiry.
Geofencing and failsafes are policy, not just parameters. In the field, operators don’t want a page of acronyms; they want to know what happens next. A good client turns the firmware’s logic into human cause-and-effect: if GPS quality drops below the configured threshold, the HUD explains that the fence expands to a conservative radius, the altitude band pins higher, and RTL will trigger if ground speed falls under a safe minimum for more than N seconds. The same clarity applies to link loss, battery failsafes, or EKF divergence. When people understand consequences, they stop guessing, and that alone removes a surprising number of incidents from the tail of your risk curve.
Configuration discipline is where many fleets quietly fail. Treat parameters as typed, versioned configuration, not a grab bag. Read board IDs and firmware versions before rendering settings; expose only what exists on that class of ardupilot flight controllers; enforce ranges from ardupilot flight controller software metadata; require an explicit “apply & sign” action for any change that touches safety surfaces—RTL behavior, fence limits, ARMING checks, speed caps. The app maintains baselines per airframe and keeps diffs you can roll back to in seconds. If a write times out mid-field, the UI states exactly which values are committed on-board, which are not, and how to restore a known-good set without a laptop.
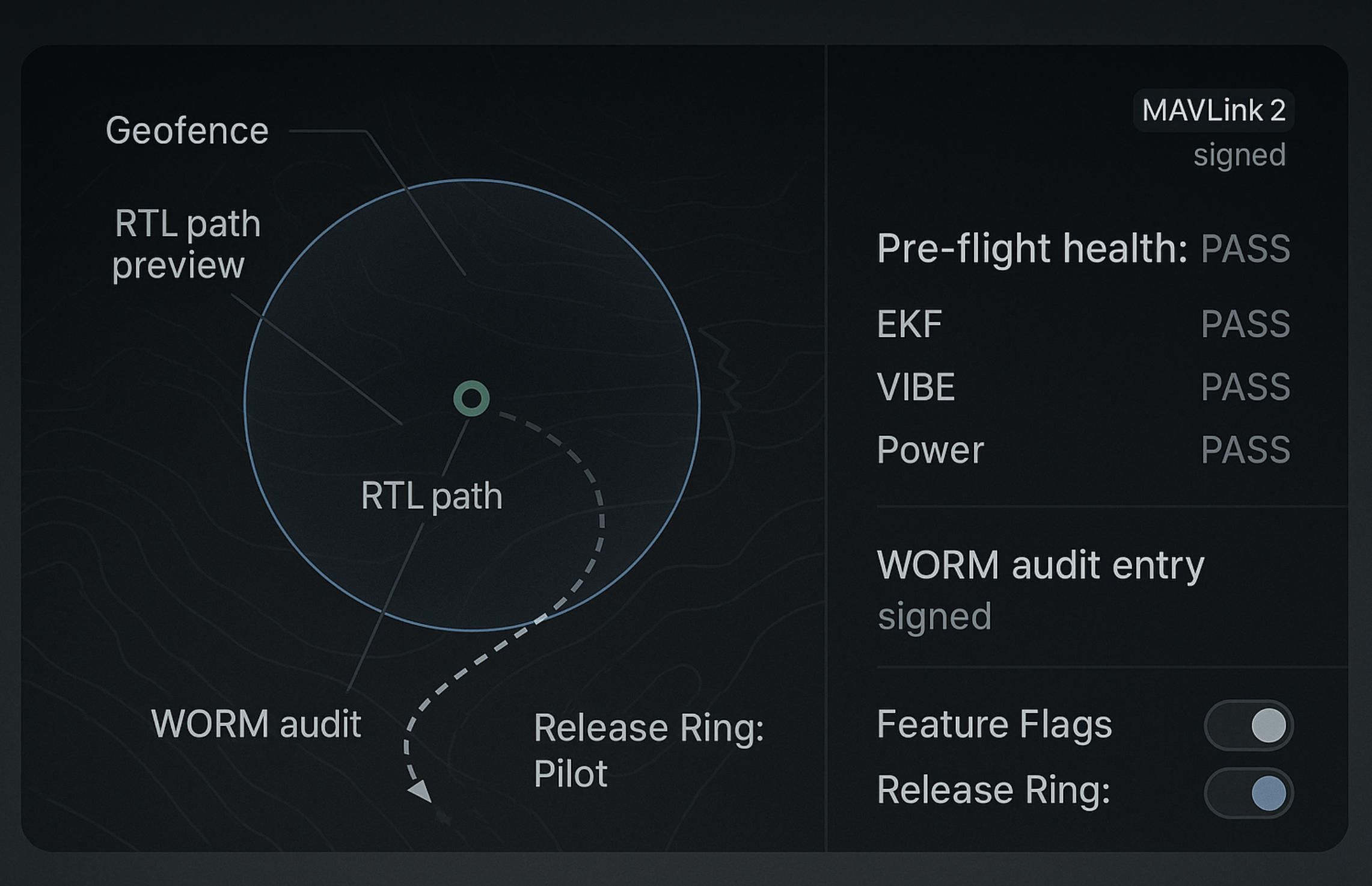
Pre-flight is not a ritual; it’s a gate. Mounting errors, unbalanced props, loose connectors—ArduPilot already exposes early hints through VIBE/clipping metrics, IMU lane consistency, power ripple, and GNSS residuals. A productized app turns those into a short, readable pre-flight report the crew cannot skip: green means go; yellow means “fix this and re-check”; red keeps the vehicle on the ground. When a team sees that the “red” states are actionable—secure a mast, rebalance a prop, reseat a plug—they learn to trust the system’s judgment rather than workaround it.
Video belongs to the same safety model even though the autopilot does not handle it. Telemetry and video run on separate sockets and are aligned to the same time base. If bandwidth collapses, the app drops vanity overlays and preserves the pilot HUD and minimal link health first; the video recorder writes keyframe-aware files with embedded mode and GNSS state so investigators don’t guess later. On long corridors or over water, that design choice prevents “invisible” failure modes where a pretty picture hides a dying link.
Release management is another layer of safety that end users rarely notice—until a bad update. Mixed fleets inevitably run multiple firmware tracks. We pin versions by hardware, gate features behind flags, roll out in rings, and watch real-time health counters—crash-free rate, watchdog resets, log truncations—before widening exposure. SITL suites run every night; hardware-in-the-loop stands between staging and field; and when the inevitable edge case appears, the rollback path is one tap. The result is a cadence that field crews experience as boring, which is the highest compliment a reliability program can earn.
Compliance isn’t a badge on a web page; it’s a trail of evidence. Remote ID where required, signed mission packages, WORM audit entries for who armed when and with which configuration, operator roles and approvals for parameter sets that matter—all of it sits alongside DataFlash logs and mobile artifacts under a single case number. When a regulator, client, or insurer asks “what exactly happened,” you hand over synchronized, tamper-evident records instead of screenshots and memory. Different jurisdictions will add their own rules; your product architecture should make those rules a matter of configuration and process, not bespoke code.
The thread through all of this is translation: ardupilot software already fuses sensors and enforces flight envelopes; the product turns that capability into behavior that crews can understand and repeat. A-Bots.com’s practice is to bind identity, time, configuration, and operator intent from the first prototype, then prove it under SITL and in pilots before scale. Do that well and your ardupilot drone stops being a lab demo. It becomes something a supervisor can sign off, an auditor can read, and an operator can fly without surprises.
8.Engagement Models & Pricing Approach
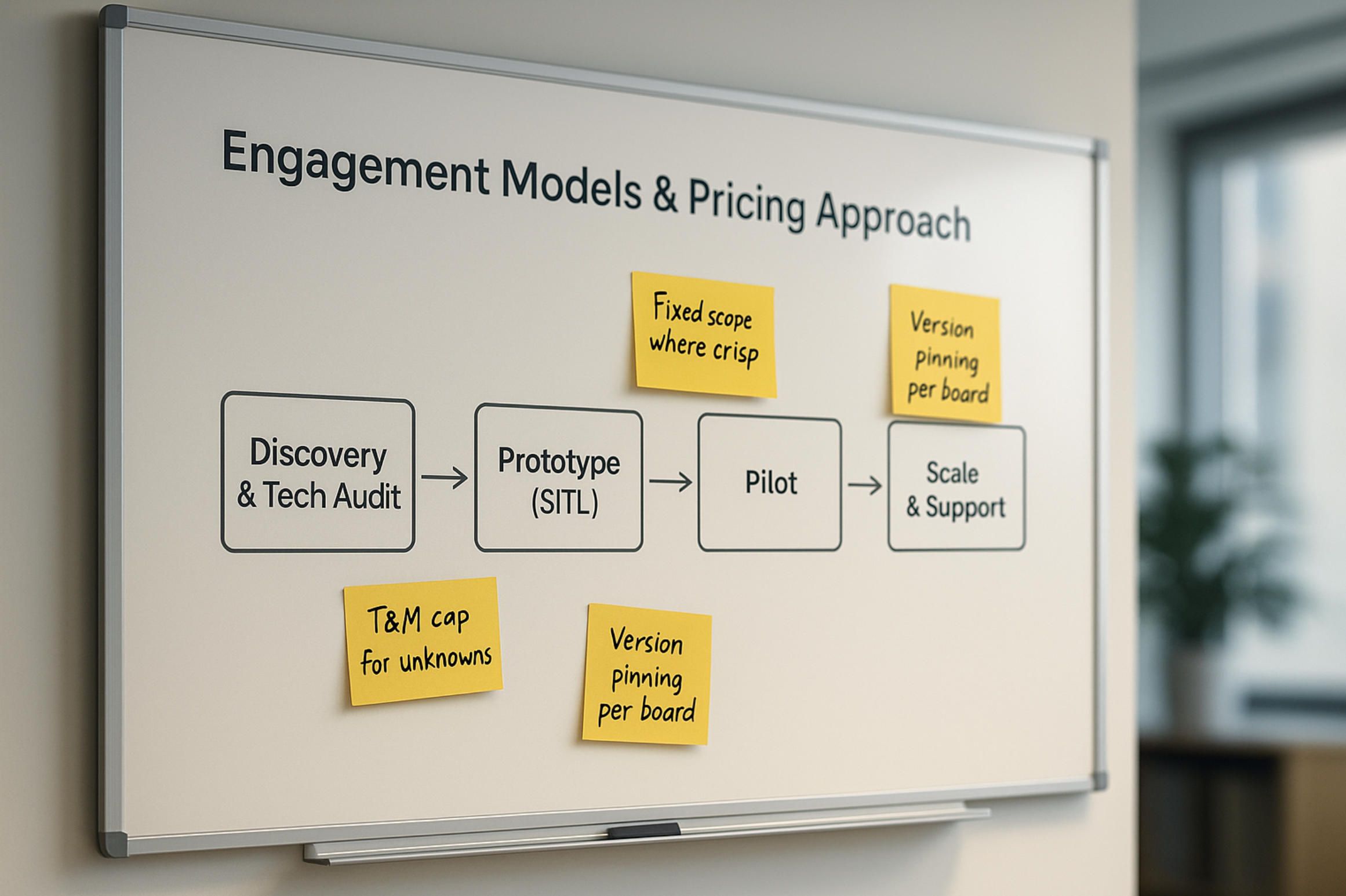
We structure collaboration so you can move from idea to fielded product without guesswork. The path usually begins with a short Discovery & Tech Audit where we align on your airframes, radios, payloads, regulations, and the operator workflows you want on mobile. We verify assumptions in ArduPilot SITL, sketch the mission UX, and identify the minimum vertical slice—telemetry, parameter discipline, mission authoring, log handling—that proves your ardupilot drone can be run like a product rather than a prototype.
From there, we build a Prototype that runs end-to-end against ardupilot software: the app speaks MAVLink 2, negotiates TIMESYNC, configures your ardupilot flight controllers, and pulls DataFlash logs into a readable health brief. If RTK or video matter, we include an NTRIP path with clear FIX/FLOAT states and a separate, time-aligned video pipeline. The goal is not a demo; it’s a slice crews can actually fly. Once that proves itself on hardware, we harden the system in a bounded Pilot—limited geography, selected operators, real missions, real constraints. Only when the pilot is boring in the best way do we widen scope, roll features behind flags, and move into Scale & Support with SLAs, release cadence, and observability you can show a supervisor.
Pricing follows the level of certainty. When the scope is crisp—“this mobile UX for these vehicle types, this RTK path, these payload controls”—we quote a fixed blueprint with named deliverables and acceptance tests driven by SITL and flight logs from your ardupilot flight controller software. When discovery reveals unknowns—new payloads, ambiguous regulatory boundaries, evolving fleet composition—we switch to time-and-materials with a hard cap, weekly burn reports, and clear go/no-go gates. Many teams blend the two: a fixed Prototype to de-risk, then a capped Pilot, then a support retainer that includes version pinning per board, parameter baselines per airframe, and field-tested release rings. You own the code in your repos; we contribute upstream where it helps (for example, sensor drivers or Lua behaviors) so you’re not stranded on a private fork.
What drives cost is rarely “how many screens.” It’s the integration envelope: how many radios and transports we must support; whether RTK is mandatory and how you’ll source corrections; how complex the payload choreography is; whether video must be recorded with evidentiary metadata; how strict offline-first needs to be; how diverse your ardupilot flight controllers are across the fleet; and what your compliance story demands in audit trails and approvals. We call these out early, attach them to measurable outcomes (crash-free rates, log completeness, RTK availability, link-loss behavior), and keep them visible as the work progresses.
Delivery is deliberately predictable. Every milestone ships with a build you can install, a SITL script you can replay, and a short flight-ops note written in operator language. Parameter changes come as signed bundles, not guesswork. Releases roll out in rings; if telemetry shows regressions, rollback is one tap and the evidence is already in your WORM audit. Support is not a ticket queue—it is a standing cadence where field feedback shapes the next ring and your product stays aligned with the realities of ardupilot software in the wild.
If you need numbers before we touch a line of code, we can frame a discovery-plus-prototype quote that gets you to first flights on a known budget, then convert to a capped pilot once the unknowns are retired. Either way, the commercial model is there to protect the thing that actually matters: a dependable mobile experience for your ardupilot drone that crews can fly without surprises.
9.FAQ about ArduPilot
What exactly is ArduPilot: a board or software?
ArduPilot is flight controller software, not a single PCB. You flash it onto compatible ardupilot flight controllers (Pixhawk-class, Cube family, Holybro, CUAV, Matek, and others) or run it alongside Linux as part of a companion setup. The hardware is the body; ArduPilot is the brain that flies your ardupilot drone.
“Treat the board as replaceable and the config as sacred.” — field note
Does ArduPilot include a ground control app?
No. Mission Planner and QGroundControl are separate clients that speak MAVLink. If you need a branded, operator-safe mobile client, that’s where A-Bots.com comes in: we build apps that configure ardupilot flight controller software, plan missions, show RTK state, pull logs, and enforce geofencing in plain language.
Which flight controllers are supported, and how do I choose?
Support is broad across Pixhawk-class and similar boards. Choosing is about I/O, CPU headroom, IMU quality, CAN/UART count, logging reliability, and how those map to your mission and UX. Survey VTOLs usually favor H7-class controllers with dual/triple IMUs and strong logging; compact rovers can live happily on lighter boards if parameter discipline and power hygiene are in place.
Can I run ArduPilot with Linux (Raspberry Pi/Jetson) for video or AI?
Yes. Many teams pair ardupilot software on the flight controller with a Linux companion for video ingest, on-device inference, storage, and network plumbing. Keep telemetry and video on separate sockets, align both to the same time base, and make failure modes explicit in the UI.
How does ArduPilot compare to PX4?
Both are mature open autopilot stacks with MAVLink. Teams often pick ArduPilot for its wide vehicle coverage (Copter, Plane/VTOL, Rover, Boat/USV, Sub/ROV), rich parameterization, and extensive logging. PX4 has its own strengths and tooling. If you’re standardizing on ardupilot flight controller software, plan your app around ArduPilot’s parameter metadata, modes, and DataFlash logs.
What is SITL and why should I care?
SITL (Software-In-The-Loop) runs ArduPilot on your computer so you can iterate on missions and UI before touching hardware. It’s the fastest way to prove a workflow and write acceptance tests for your mobile client. Teams that make SITL routine ship fewer surprises to the field.
“If it didn’t pass in SITL, it had no business on the flight line.” — test lead mantra
How do RTK corrections and NTRIP fit into an ArduPilot product?
ArduPilot supports RTK-capable GNSS; your app supplies corrections via NTRIP. Operators shouldn’t have to be GNSS experts: show FIX/FLOAT in words they can act on, and latch the solution state to every camera or sonar event so QA can prove accuracy later. When FIX drops, widen fences and pin conservative speed/altitude automatically.
Does ArduPilot handle video streaming?
No. The autopilot doesn’t “do video.” You carry video on a companion or payload and keep it distinct from MAVLink telemetry. Time-align frames to MAVLink so overlays and recordings are evidentiary. On poor links, your app should sacrifice vanity overlays before it sacrifices pilot HUD and link health.
How do geofences and failsafes work in practice?
They are policy encoded as parameters in ardupilot flight controller software. A good app translates them into human language: what triggers an action, what the vehicle will do next (RTL, Land, Loiter), and how to override safely. Operators fly better when consequences are obvious.
What logs exist and how are they used?
ArduPilot produces DataFlash logs on the controller (IMU/EKF/GPS/power/vibration) and telemetry logs on the ground side. Pull DataFlash via MAVLink FTP, parse on device, and summarize health in one page. Your support team—and any auditor—will thank you.
Can I extend ArduPilot without forking?
Yes. Lua scripting and AP_Periph on DroneCAN let you add behaviors and smart peripherals without a private fork. Many product teams upstream drivers/fixes where appropriate and keep product-specific logic in the mobile layer.
Is ArduPilot suitable for BVLOS or regulated operations?
ArduPilot provides the building blocks—failsafes, geofences, logs, Remote ID integrations where applicable—but compliance is a system property: airframe, procedures, training, records, and approvals. Treat the app as the place where policy becomes enforceable behavior and evidence.
What about security—can MAVLink be trusted?
Use MAVLink 2 with signing where it fits your architecture, and design for lossy networks. The app should establish TIMESYNC early, validate identity, and keep a WORM audit of critical actions. Security is defense in depth: identities, signatures, operator roles, and a boring release cadence.
We operate mixed fleets. Will one app work across vehicles?
Yes—if you respect differences. Read board IDs and firmware versions, render only relevant settings, and reuse mission patterns (grid, corridor, façade, bathymetry) across types. That’s how one app can run a multirotor mapper, a VTOL inspector, a USV survey kit, and a rover patrol—all on ardupilot flight controllers.
Can A-Bots.com help us go from prototype to product?
That’s our lane. We design mobile UX around ardupilot software: parameter guardrails, mission editors that understand terrain/surface follow, NTRIP with plain-English states, separate and time-aligned video, fast log pulls, and release management that field crews experience as pleasantly boring. Start with a 30-minute consult; we’ll prove your workflow in SITL, then harden it on hardware.
“The best compliment from the field is silence.” — reliability engineer, after a zero-drama release
How do you price work if requirements evolve?
When scope is crisp, we fix-price against SITL-verified acceptance tests; when there are unknowns (new payloads, evolving radios), we use a capped time-and-materials phase and promote stable pieces to a fixed track. Either way, the goal is a dependable mobile experience for your ardupilot drone, not a pile of toggles.
Need something specific that’s not here? Ask for a quick SITL demo with your mission pattern and hardware short-list. If it flies cleanly in simulation, we’ll take it to the field and turn it into a repeatable workflow on ardupilot flight controller software.
10.Interesting Facts about ArduPilot
ArduPilot began as ardupilot software—a firmware project, not a board—and that origin matters more than nostalgia. Because the core is software, teams can flash the same ardupilot flight controller software onto very different airframes and still keep a consistent mental model for operators. The board can change; the behavior stays legible. That is why a single mobile app can command a quad today and a USV tomorrow without rewriting the rulebook.
One of the quiet superpowers is breadth: multirotors, fixed-wing, VTOL, rovers, boats, subs, even antenna trackers—all live under the same autopilot umbrella. In practice this means your ardupilot drone can share mission logic, geofences, and failsafe semantics with a boat doing bathymetry or a rover on warehouse patrol. The UX benefits enormously: the same “Auto/Guided/RTL” language travels with the crew between vehicles.
A second superpower is testability. Software-in-the-Loop (SITL) lets you boot the real firmware on a laptop and fly a simulated world before hardware ever leaves the bench. Teams that lean on SITL write acceptance tests for their mobile UX—mission upload, parameter guards, log pulls, RTK states—and only then touch the field. “If it didn’t pass in SITL, it has no business on the flight line,” as one test lead likes to put it.
ArduPilot’s parameter system isn’t just a bag of toggles; it carries metadata—types, ranges, units, grouping—that a well-designed client can translate into safe configuration panels. When a mobile app reads those definitions, it can prevent fat-finger errors, diff and roll back parameter sets per airframe, and turn configuration into policy rather than folklore. That small architectural choice is what separates a reliable product from a lucky prototype.
Data matters after the prop stops, and the project’s DataFlash logs are unusually rich—IMU, EKF, GPS innovations, power ripple, vibration (VIBE), event marks, and more. Pulling those logs over MAVLink FTP and aligning them to the same time base as your video means support can answer “what happened?” without guesswork. In regulated environments this becomes evidentiary: one clock, one story.
Extensibility arrives in two directions. On-vehicle Lua scripts add behaviors—pre-flight checks, payload routines, safety interlocks—without forking the core, while DroneCAN turns peripherals into first-class citizens with identity and diagnostics. A GNSS becomes a self-describing node, a rangefinder announces its health, a smart ESC volunteers temperature and RPM. For a mobile app, that is a dream: devices that introduce themselves and a bus that scales cleanly.
There is also a philosophy about separation of concerns that product teams appreciate. ArduPilot flight controllers fly; companions and payloads handle video and heavy compute; the mobile app orchestrates with MAVLink, keeps time honest (TIMESYNC), and presents operator language rather than registers and bitfields. “Treat MAVLink as a contract, not a pipe,” is a useful mantra: sign what you can, degrade gracefully when networks misbehave, and never let a pretty overlay hide a dying link.
A fun, under-celebrated detail is how far the same codebase travels. The ardupilot flight controller software that manages TECS energy on a mapping plane also holds depth on a sub and station-keeps a USV against current. Swap the sensors and actuators, keep the abstractions, and the operator still sees familiar prompts: mode banners, fence messages, FIX/FLOAT states, health hints that read like English rather than error codes.
Finally, community gravity matters. Because the project is open and long-lived, you will find upstream drivers for new sensors, a well-trodden SITL workflow, and a culture of turning field pain into firmware improvements. That allows vendors to ship devices that feel native on day one and lets integrators like A-Bots.com contribute fixes upstream while keeping product-specific UX, analytics, and compliance logic in the app. The result for you is practical: fewer private forks, faster onboarding of new ardupilot flight controllers, and a shorter path from “works on my bench” to “works in the rain.”
“The best compliment from the field is silence: no surprises, no drama, just flights that look the same every time.”
Reference note: when you see “ArduPilot” in spec sheets, read it as the firmware stack; when you see “Pixhawk,” “Cube,” “Durandal,” or “Matek H7,” read those as the boards that host it. Pair the right hardware with the right ardupilot software build and a purpose-built mobile UX, and your ardupilot drone stops being a gadget—it becomes a dependable piece of your workflow.

✅ Hashtags
#ArduPilot
#ArduPilotDrone
#FlightController
#MAVLink
#RTK
#DroneCAN
#SITL
#MissionPlanning
#UAV
#VTOL
#USV
#UGV
#MobileUX
#GroundControl
#ABots
Other information
Custom Drone Software Mastery - ArduPilot and MissionPlanner This long-read unpacks the commercial drone boom, then dives into the technical backbone of ArduPilot and Mission Planner—one open, multi-domain codebase and a ground station that doubles as a full-stack lab. From rapid-prototype firmware to data-driven optimisation retainers, A-Bots.com shows how disciplined codecraft delivers measurable wins: 40 % fewer mission aborts, 70% faster surveys, and faster BVLOS approvals. Finally, the article looks ahead to AI-augmented navigation, Kubernetes-coordinated swarms and satellite-linked control channels, detailing the partnerships and R&D milestones that will shape autonomous, multi-domain operations through 2034. Read on to see why enterprises choose A-Bots.com to turn ambitious flight plans into certified, revenue-earning reality.
Counter-Drone (C-UAV) Machine Vision: Onboard Detection, Tracking & Trajectory Prediction This article is a production blueprint for counter-drone perception on a chaser UAV. We focus on the machine-vision core—detecting a tiny intruder, holding lock through clutter and occlusions, and predicting its path for guidance. You’ll see what sensor stacks really help (global-shutter EO, LWIR for night, optional event cameras, compact mmWave for range/Doppler), how to size edge compute (Jetson Orin NX or Qualcomm RB5), and which algorithms consistently survive on board (small-object detectors, OSTrack/MixFormer plus ByteTrack, IMM-UKF fusion, PN-ready outputs). We map the training path from VisDrone/UAVDT to Anti-UAV and the new CST Anti-UAV thermal benchmark, define KPIs that predict field performance (time-to-lock, re-acquire, glass-to-state), and document the operational glue—time sync, boresight, QoS, OTA with rollback. If your goal is a reliable C-UAV stack rather than a lab demo, A-Bots.com can deliver the ROS 2 graph, quantized engines, calibration assets, and guidance bridge you need to deploy—day or night.
Drone Mapping Software (UAV Mapping Software): 2025 Guide This in-depth article walks through the full enterprise deployment playbook for drone mapping software or UAV mapping software in 2025. Learn how to leverage cloud-native mission-planning tools, RTK/PPK data capture, AI-driven QA modules and robust compliance reporting to deliver survey-grade orthomosaics, 3D models and LiDAR-fusion outputs. Perfect for operations managers, survey professionals and GIS teams aiming to standardize workflows, minimize field time and meet regulatory requirements.
ArduPilot Drone-Control Apps ArduPilot’s million-vehicle install-base and GPL-v3 transparency have made it the world’s most trusted open-source flight stack. Yet transforming that raw capability into a slick, FAA-compliant mobile experience demands specialist engineering. In this long read, A-Bots.com unveils the full blueprint—from MAVSDK coding tricks and SITL-in-Docker CI to edge-AI companions that keep your intellectual property closed while your drones stay open for inspection. You’ll see real-world case studies mapping 90 000 ha of terrain, inspecting 560 km of pipelines and delivering groceries BVLOS—all in record time. A finishing 37-question Q&A arms your team with proven shortcuts. Read on to learn how choosing ArduPilot and partnering with A-Bots.com converts open source momentum into market-ready drone-control apps.
ArduCopter Apps by A-Bots.com - Custom Drone Control 2025 Need industrial-grade drone control? Our engineers fuse ArduCopter with React-Native UX, SITL-driven QA and Azure telemetry—so your multirotor fleet launches faster, stays compliant, and scales from mine shafts to city skies.
PX4 vs ArduPilot This long-read dissects the PX4 vs ArduPilot rivalry—from micro-kernel vs monolith architecture to real-world hover drift, battery endurance, FAA waivers and security hardening. Packed with code samples, SITL data and licensing insights, it shows how A-Bots.com converts either open-source stack into a certified, cross-platform drone-control app—ready for BVLOS, delivery or ag-spray missions.
QGroundControl vs Mission Planner | A-Bots.com Guide Which cockpit wins in 2025—QGroundControl or Mission Planner? This long-read dissects search analytics, feature benchmarks and Remote-ID hurdles, then maps A-Bots.com’s blueprint for turning either open-source ground station into a white-label, FAA-ready drone-control app tailored to your fleet.
Mastering the Best Drone Mapping App From hardware pairing to overnight GPU pipelines, this long read demystifies every link in the drone-to-deliverable chain. Learn to design wind-proof flight grids, catch RTK glitches before they cost re-flights, automate orthomosaics through REST hooks, and bolt on object-detection AI—all with the best drone mapping app at the core. The finale shows how A-Bots.com merges SDKs, cloud functions and domain-specific analytics into a bespoke platform that scales with your fleet
Drone Mapping and Sensor Fusion Low-altitude drones have shattered the cost-resolution trade-off that once confined mapping to satellites and crewed aircraft. This long read unpacks the current state of photogrammetry and LiDAR, dissects mission-planning math, and follows data from edge boxes to cloud GPU clusters. The centrepiece is Adaptive Sensor-Fusion Mapping: a real-time, self-healing workflow that blends solid-state LiDAR, multispectral imagery and transformer-based tie-point AI to eliminate blind spots before touchdown. Packed with field metrics, hidden hacks and ROI evidence, the article closes by showing how A-Bots.com can craft a bespoke drone-mapping app that converts live flight data into shareable, decision-ready maps.
Litchi vs DJI Fly Choosing between Litchi and DJI Fly now shapes mission safety, data ownership and long-term budgets. This in-depth 2025 guide dissects both ecosystems: advanced waypoint scripting, Remote ID readiness, device and firmware compatibility, hidden operating costs and real-world use cases from cinematic shoots to corridor inspections. Drawing on community reports and the latest SDK 5 roadmap, it helps pilots, surveyors and enterprise managers decide which app delivers the most value—and explains why A-Bots.com’s custom-built drone software can merge the strengths of each platform into a single, brand-tuned solution.
Drone Survey Software: Pix4D vs DroneDeploy The battle for survey-grade skies is heating up. In 2025, Pix4D refines its lab-level photogrammetry while DroneDeploy streamlines capture-to-dashboard workflows, yet neither fully covers every edge case. Our in-depth article dissects their engines, accuracy pipelines, mission-planning UX, analytics and licensing models—then reveals the “SurveyOps DNA” stack from A-Bots.com. Imagine a modular toolkit that unites terrain-aware flight plans, on-device photogrammetry, AI-driven volume metrics and airtight ISO-27001 governance, all deployable on Jetson or Apple silicon. Add our “60-Minute Field-to-Finish” Challenge and white-label SLAs, and you have a path to survey deliverables that are faster, more secure and more precise than any off-the-shelf combo. Whether you fly RTK-equipped multirotors on construction sites or BVLOS corridors in remote mining, this guide shows why custom software is now the decisive competitive edge.
Top stories
Copyright © Alpha Systems LTD All rights reserved.
Made with ❤️ by A-BOTS