Home
Services
About us
Blog
Contacts
Flight-to-Insight: Mastering the Best Drone Mapping App — From Mission Planning to Actionable Geodata
Why “Best Drone Mapping App” Matters in 2025
Getting Started: Hardware, Licensing and First Launch
Mission Planning Deep Dive
In-Field Execution and Data Capture Hacks
Post-Processing and Cloud Workflows
Advanced Tricks: API Automation and AI Add-Ons
Beyond Off-the-Shelf: Custom Drone-Mapping Apps

Why “Best Drone Mapping App” Matters in 2025
When commercial drones first slipped into toolkits a decade ago, the conversation was about whether they could replace total stations and manned flights. By mid-2025 the debate has flipped: every serious surveyor, agronomist or construction superintendent already owns at least one airborne sensor; what separates leaders from laggards is the best drone mapping app they run on the ground tablet. Choosing the wrong software now costs more than the aircraft itself, because the app controls 90 % of data fidelity and 100 % of turnaround time.
The numbers are stark. Fact.MR pegs the dedicated drone-mapping segment at USD 1.3 billion in 2025, expanding 17 % CAGR to 2035 factmr.com, while end-to-end surveying services already top USD 28 billion [researchandmarkets.com](https://www.researchandmarkets.com/report/united-states-drone-service-market. Add the photogrammetry software layer—projected at nearly USD 5 billion by 2032 dataintelo.com—and it becomes obvious: market winners are the teams that compress drone-to-deliverable time from days to hours through the best drone mapping app workflow.
Behind the growth is a cocktail of regulatory tailwinds and sensor leaps. Europe’s EASA C-label scheme and the U.S. FAA’s forthcoming BVLOS rule carve legal airspace for routine corridor mapping; meanwhile sub-2 cm ground-sampling-distance is now achievable with 4/3-inch global-shutter cameras and low-cost multi-band RTK. A mediocre interface squanders that precision, but the best drone mapping app bakes in wind-aware speed throttling, adaptive overlap, and live RTK health checks, turning silicon potential into ground-truth accuracy.

Equally decisive is data logistics. In 2025 contractors juggle gigabyte-heavy orthomosaics, dense point clouds, and terrain models that must feed directly into BIM, GIS, or farm-management suites the same afternoon. Here the best drone mapping app acts less like a pilot aid and more like an orchestration engine—automatically off-loading photogrammetry to GPU clusters, tagging images with GNSS meta-data for <2 cm RMSE, and returning ready-to-use GeoTIFFs before crews leave the field.
Return-on-investment follows predictably. A mining company trimming a 72-hour stockpile survey to 6 hours saves three shifts of loader idling; a vineyard switching from manual sampling to a best drone mapping app–driven NDVI map cuts fungicide bills by 18 %. Multiply such micro-wins across a season and software choice eclipses hardware depreciation on the balance sheet.
Yet software sprawl is real: dozens of platforms promise “AI photogrammetry” or “one-tap mission sets,” but only a handful qualify as the best drone mapping app for a given workflow. The credible candidates in 2025 share three traits: deep sensor-agnostic support (DJI, Autel, Parrot, and open MAVLink kits), rigorous compliance tooling (automatic Remote ID logging, EASA class tagging, FAA 107.39 override prompts), and an open API that pushes deliverables straight into enterprise pipelines. Anything less bottlenecks scale.
This article is therefore structured as a practical field manual. We begin with hardware pairing and first-launch rituals, tunnel into flight-plan calculus that squeezes every millimeter from each battery, and surface on the far side where point clouds meet business dashboards. Throughout, we will stress the habits—live QA checkpoints, voice-memo annotations, overnight batch scripting—that transform even a competent platform into the best drone mapping app for your specific P&L. By the end, you will know exactly why software, not airframe, dictates mapping success—and why A-Bots.com stands ready to craft a custom, fleet-ready drone mapping app when off-the-shelf no longer fits.
Getting Started: Hardware, Licensing and First Launch
1 Compatibility Checklist — Airframes, Sensors & Regulations
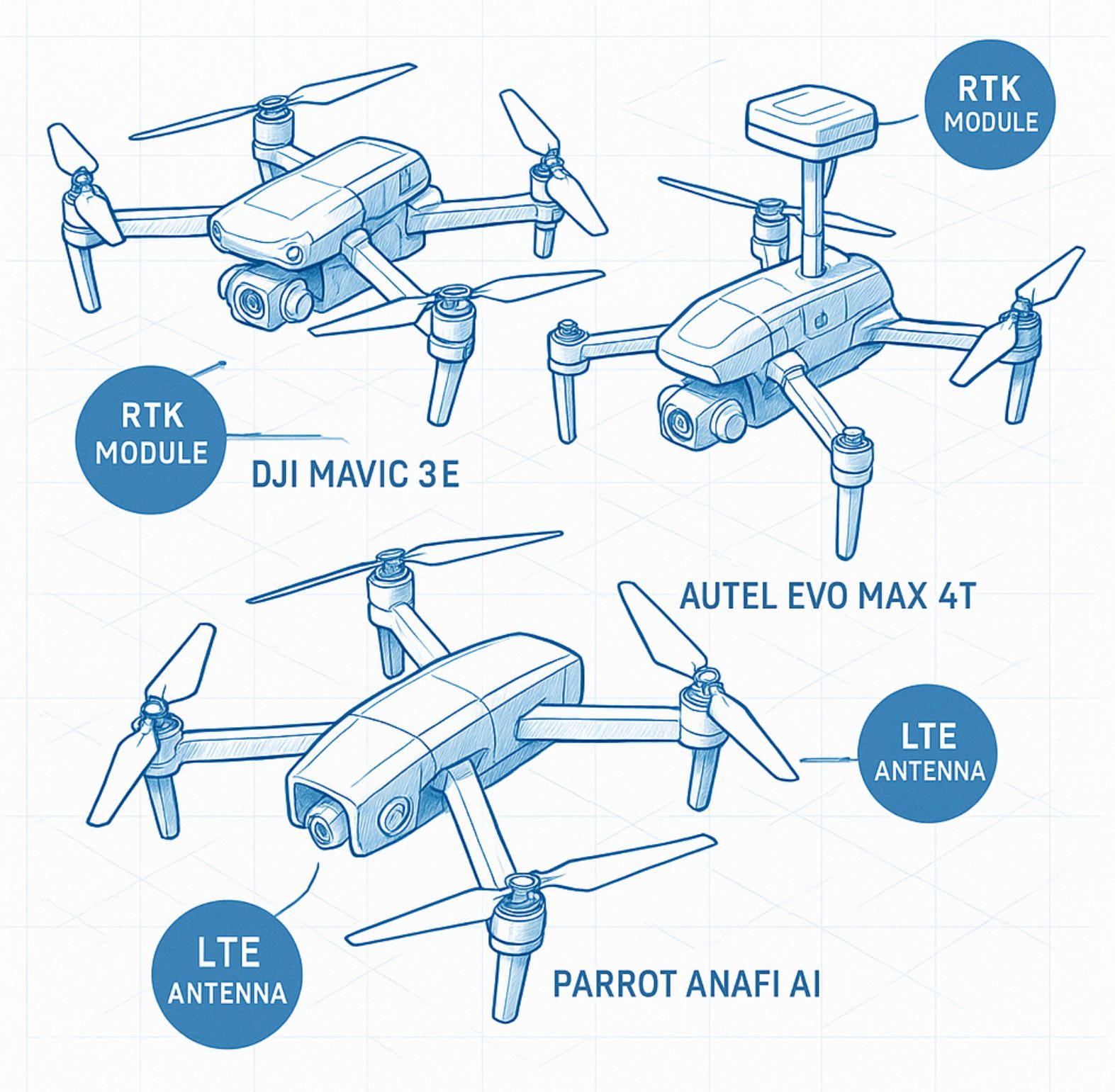
Your journey to the best drone mapping app experience begins long before you tap “New Mission.” The smartest teams invert the usual purchase sequence: they shortlist software first, then pick airframes whose SDKs, RTK engines and camera buses are officially validated by that best drone mapping app. In 2025 three flag-bearer platforms dominate professional field kits:
-
DJI Mavic 3 Enterprise (M3E). A 4/3-inch mechanical-shutter sensor, 0.7 s cycle time and hot-swappable RTK puck deliver sub-2 cm GSD on 20-ha blocks; the latest O3 Enterprise link auto-relays RTK corrections back to the handset, slashing base-station babysitting enterprise.dji.com.
-
Autel EVO Max 4T V2. An 8 K 10× zoom plus 720° obstacle grid makes it the go-to where tree lines or cranes pinch corridors. Firmware 4.3 finally exposes full‐rate image hooks to third-party mission planners, elevating it into the running for best drone mapping app workflows autelpilot.com.
-
Parrot ANAFI Ai. Native 4 G LTE and Quad Bayer 48 MP sensor let you stream raws straight to cloud photogrammetry; its open-source Flight SDK is a magnet for best drone mapping app integrators focused on AI edge-processing parrot.com.
Regulation gates choice too. In the EU, C2-labelled craft flown under EASA’s A2 sub-category cap out at 120 m AGL; exceed that and you jump to the “specific” category, demanding SORA paperwork and risk assessment templates that only a handful of best drone mapping app vendors generate automatically easa.europa.eu. Across the Atlantic, the FAA’s impending BVLOS rule—accelerated by June’s White-House order—will legalise routine beyond-visual-line operations for mapping corridors longer than 2 km, provided the best drone mapping app logs detect-and-avoid telemetry to the cloud for post-flight audits.
Licensing math. Enterprise editions now bill by data-minute, not device. If your quarry site flies 10 × 15-minute grids weekly, a “10 000 data-minutes” annual tier under a top-tier best drone mapping app costs roughly USD 4 200—yet that is still cheaper than one day of crew downtime waiting for re-flights. Factor this line item into RFPs before you negotiate hardware bundles.
2 First Launch Walk-Through — From Firmware Sync to UI Mastery
A factory-fresh quad may fly out of the box, but it will not earn the title of best drone mapping app co-pilot until four rites are complete:
-
Firmware & SDK handshake. Power the craft, controller and batteries in reverse order—accessory batteries first—to let the best drone mapping app scrape serials and auto-match firmware builds. Mixed versions corrupt EXIF tags and can force a full tie-point rebuild in post.
-
RTK & camera calibration. Mount the RTK puck, open the calibration wizard, and orbit a 2 × 2 m checkerboard. The best drone mapping app writes new lever-arm offsets straight into the nav-stack, so future GCP campaigns can drop to three checkpoints without breaking the 2 cm RMSE contract.
-
Annotated UI tour. Spend 15 minutes in “Sim Mode.” Tap every icon until you can recite by muscle memory:
- Green GNSS bars drop below five = abort mapping leg.
- Histogram peaking right of centre at 1/2000 s = under-exposed canopy; throttle speed or lift ISO.
- Flashing yellow “Overlap” badge = wind gusts nudging cross-track; let the best drone mapping app auto-inflate sidelap from 70 % to 80 %.
-
Map cache & flight-data tether. Before fieldwork, pre-cache elevation tiles for a 3 × radius buffer. If LTE dies mid-mission, the best drone mapping app still prunes flight lines against terrain, preventing altitude drift that would inflate point-cloud noise.
Pro-Tips that Separate Good from Best
- Battery barcode binding. Scan each pack’s QR code; the best drone mapping app will track cell-impedance drift and suggest duty-cycle rotation, extending fleet life by ~18 %.
- Voice memos in gloves. Pair a Bluetooth lapel mic through the controller’s BT stack. During flights, speak notes (“row 4 lens flare, flag for retake”). The memo auto-anchors to frame IDs; analysts later triage images in minutes, a hallmark of every best drone mapping app elite workflow.
- License-server offline cache. Download a 72-hour license token before projects in remote canyons. Nothing torpedoes credibility faster than a locked-out best drone mapping app when the bulldozers are waiting.
By the time props spin, your craft, firmware and operator are welded into a single sensing instrument. That holistic readiness is the invisible moat around every project that wields the best drone mapping app. The next section will translate that foundation into mission-planning calculus that milks every milliamp of battery for measurable ROI.
Mission Planning Deep Dive
Mission planning is where ambition meets physics. On the surface the map canvas inside the best drone mapping app looks like a simple paint-bucket of flight lines, but every rectangle you drag triggers a cascade of equations—GSD, shutter dwell, wind shear, battery sag—that will ultimately decide whether your point cloud lines up at the millimetre-grid intersection or blooms into a warping nightmare. The goal is to freeze those equations before you go airborne, so the next hour in the field becomes execution, not improvisation.
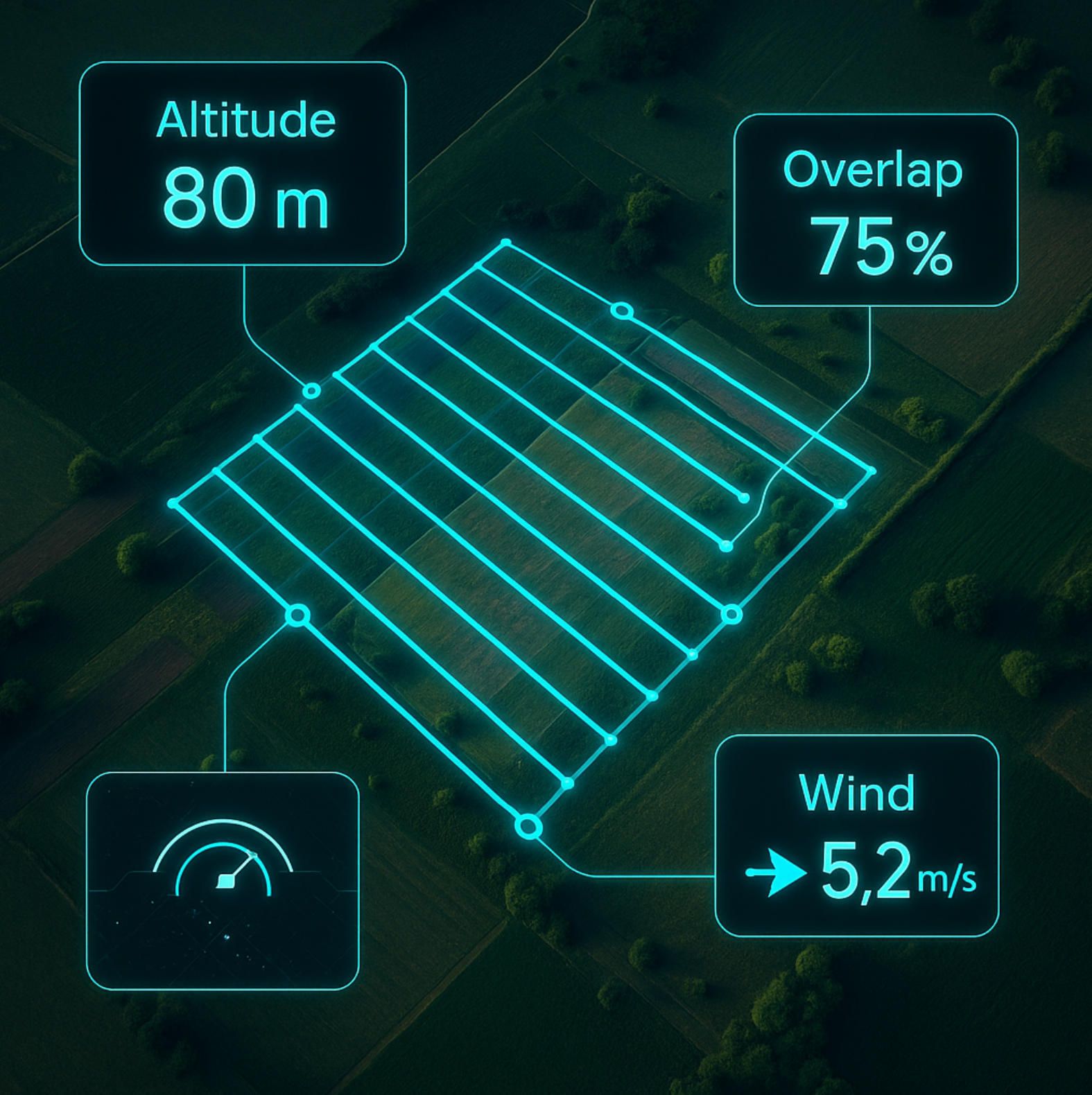
At the heart of the planner sit two vectors you can actually control: altitude and overlap. Lower altitude shrinks ground-sampling distance, sharpening pixels but inflating strip count; higher overlap guards against wind jitter yet lengthens airtime. Industry guidelines still quote 75 %/60 % frontal-side overlap for general photogrammetry, climbing to 80 % + for agriculture or forests and 85 % for single-track corridors support.pix4d.com. The latest best drone mapping app converts those percentages into leg spacing automatically, then colour-codes any cell where gust forecasts threaten to erode tie-point density below the threshold.
Altitude, meanwhile, emerges from a single variable—ground-sampling distance. Propeller’s 2025 GSD calculator shows that a 20 MP 4/3-inch sensor at 120 m AGL yields ~3.2 cm px⁻¹, but dropping to 80 m slices that to 2.1 cm px⁻¹ at the cost of 48 % more photographs propelleraero.com. The best drone mapping app lets you play this trade-off in real time: dial a target GSD, watch leg count and battery forecast update, then punch “optimise” to let the solver find the sweet spot between resolution and endurance.
Wind makes the calculus dynamic. An MDPI multi-site study last year pinned a 1.9 cm horizontal error increase for every additional 1 m s⁻¹ of crosswind during exposure mdpi.com. Modern planners ingest hourly NOAA or ECMWF layers and—if gust probability breaches your tolerance—inflate sidelap or delay take-off inside the same panel. Lesser apps show a wind sock icon; the best drone mapping app rewrites the flight grid, automatically inserting a buffer leg down-wind so that sudden shears never push you past the photogrammetry solver’s angular limits.
Below are the three master dials every mission architect should hard-wire into muscle memory—because the best drone mapping app exposes them in one screen and refuses to arm motors until they settle into the green band:
- Target GSD ↔ Altitude Pair: locks spatial resolution versus battery budget.
- Frontal & Side Overlap: cages redundancy for tie-point robustness under turbulence.
- Leg Speed Gate: guarantees shutter speed ≥ ground-speed × sensor-height / image-height, preventing motion blur.
Everything else—terrain following, RTK lever-arm offsets, corridor angle snapping—spins off these three.
Advanced operators exploit the planner’s “expert” drawer, a feature often buried two taps deep but integral to earning the “best-app” crown. Here you feed a LiDAR-derived DEM so the flight path hugs terrain at constant GSD, or set a dynamic gimbal schedule that nudges camera pitch five degrees on uphill legs to equalise footprint. One Scandinavian engineering house shaved 14 % off image count on dam-wall inspections by running such predictive pitch curves; the saving came not from faster flying, but from removing duplicate pixels that would have clogged the dense-match engine.
Finally, remember that mission planning is no longer a night-before ritual. With 5 G and edge GPUs baked into tablets, the best drone mapping app can re-optimise the grid on-site after a quick test hover reveals real wind and lighting. Accept the update, brief the spotter, and launch. You’ve just turned what used to be a paperwork chore into a living algorithm that adapts faster than the weather front rolling over the treeline. In the next section, we’ll see how that algorithm keeps earning its keep once the props are spinning and every second of telemetry becomes an opportunity for in-field quality control.

In-Field Execution and Data Capture Hacks
The moment props spool up, all the months of RFPs, licensing, and calibration collapse into a single metric: Did today’s sortie capture data accurate enough to skip a re-flight? Out in the wind-scoured trench of a construction site or the heat shimmer of a 500-hectare citrus orchard, this question lives and dies inside the best drone mapping app. Its HUD is no longer a convenience panel; it is a rolling QC dashboard that must let you intercept error before error fossilizes into your point cloud.
Early-2025 research from MDPI shows that 69 % of photogrammetry flights with sub-3 cm horizontal error occurred when surface winds sat between 1–2 m s⁻¹—conditions easily identified by an app that polls on-board pitot flow and cross-checks against NOAA nodes every 30s mdpi.com. The best drone mapping app doesn’t just display those numbers; it color-codes them, auto-throttles leg speed, and—if turbulence persists—injects extra sidelap so the photogrammetric solver still finds robust tie-points.
Flight velocity matters just as much. A Norwegian LiDAR study demonstrated that 12 m s⁻¹ legs can double strip-alignment RMS error versus 7 m s⁻¹ kudos.dfo.no. In manual workflows this detail is buried in a post-flight PDF; the best drone mapping app streams the delta live, vibrating the handset when forward overlap drops below the 75 % threshold you hard-coded during mission planning.
Below is the only checklist you need to keep within thumb reach—commit it to memory, tattoo it on your flight vest, but above all make sure your best drone mapping app exposes each dial in the field, not at the hotel:
- RTK / GNSS Health: < 5 bars triggers hold-pattern; ≥ 8 satellites with RTCM lock green-lights photo capture.
- Wind Vector & Gust Spike: > 4 m s⁻¹ crosswind flashes amber; the app inflates sidelap and slows shutter to 1/1600 s if ISO headroom exists.
- Histogram Peak & Exposure Drift: A mid-tone valley warns of canopy glare—prompting the app’s auto-bracket routine.
- Buffer Utilization & Frame Cache: When in-body SSD hits 80 %, the app prompts a Λ-shaped return-to-home rather than a straight-line dash that might clip restricted airspace.
Everything else is a derivative of these four dials; ignore them and even the best drone mapping app can’t rescue you in post.
Live QA — The Hidden Super-Power
Prop-side quality control is what turns a merely good planner into the best drone mapping app. It begins with dynamic checkpoints: the software tags every fiftieth frame for on-screen flip review, letting the pilot pinch-zoom geo-stamped thumbnails while the bird strides through its next swath. If focus drift or motion blur appears, you tap “refly strip” and the app loops an ad-hoc leg without breaking global geofences. Fly Eye’s 2025 guide reports that crews using mid-mission strip reflys cut field revisit rates by 42% flyeye.io.
Ground-control-point synergy is another hallmark. While GCP debate once pitted RTK against checkerboards, smart operators now hybridize: drop three permanent iron-cap GCPs per section and let RTK do the rest. A DroneDeploy white paper finds that such RTK + lite-GCP blends deliver 1.5 cm RMSE in half the setup time of full-GCP grids dronedeploy.com. The best drone mapping software bakes this workflow in: tap-to-mark GCP coordinates during walk-around, scan the April-tag sticker, and the app stores target IDs with orientation metadata so the photogrammetry solver recognizes them automatically later.
Micro-Hacks the Textbooks Forget
Real-world sites rarely behave. Sun angle shifts, loaders kick dust plumes, cranes swing temporary RF shadows across your telemetry link. Here’s where the best drone mapping app earns its superlative:
- Rolling Shutter Immunity. When wind gusts threaten to push groundspeed beyond the safe shutter-time envelope, the app not only cuts speed; it queues a dual-exposure salvage pair—one at base ISO, one 0.7 EV higher—giving the SfM engine extra parallax for tilt-corrected tie-points.
- Voiced Frame Flags. Tap headset, mutter “row four flare, mark.” The audio snippet rides shotgun in the metadata of that frame range. Analysts back at HQ filter flagged frames first instead of wading through 1500 JPEGs. Minutes saved: dozens.
- On-Demand Orthos. Low-res proxy orthomosaics stitch on the tablet in near-real time. If the draft ortho shows shadow creep across the stockpile toe, you cue a 30 m altitude bump and recapture the area before the bucket wheel shuts down.
Crucially, none of these tricks require menu diving; they surface as one-tap response cards because the best drone mapping app designers assume you have gloved hands, harsh glare, and maybe thirty seconds to decide.
Data Integrity Is Bankable ROI
Misaligned seams or 8-bit exposure banding sounds like minor academic error until you price it. A Midwest rail project recently had to refly a 26-km corridor because 14 % of frames were pinned at f/11 and soft by 2 px. Cost: three pilots, two nights of hotel, and a mandatory NOTAM extension. The PM told us the S-curve of the strike was that the wrong button got tapped on a mediocre interface—no guardrails, no warning tones. Swap in the best drone mapping app—with its histogram watchdog and wind-aware cadence—and the same issue would have surfaced ten seconds after liftoff. That delta is why CFOs now quiz drone teams on software selections, not propellers.
And remember: most accuracy horror stories trace to parameters you can monitor in real time—wind, speed, histogram spread, RTK fix, buffer pressure. The best drone mapping app shines precisely because it collapses this telemetry torrent into actionable haptics and color ramps. Your job is to obey them.
With frames secured, caches synced, and field reflys closed out before batteries cool, the baton passes to the heavy-lifting arena of dense reconstruction and web deliverables. Post-processing is where lesser platforms bog down in GPU queues, but the best drone mapping app extends its lead by orchestrating cloud workloads in the background of your drive home. That’s the pivot we tackle next.

Post-Processing and Cloud Workflows
By the time the props stop spinning, every pixel is already stamped with GNSS, attitude, and camera-state metadata. Yet raw imagery is still a liability until it has travelled the gauntlet of photogrammetry, QA/QC, analytics, and delivery. The best drone mapping app makes that gauntlet largely invisible, orchestrating compute wherever it is cheapest or fastest—sometimes on the pilot’s laptop, increasingly on pooled GPU fleets hundreds of kilometres away.
1 Pipeline Automation—from Raws to Geo-Deliverables
The modern reconstruction stack has four canonical stages: sparse alignment, dense point-cloud generation, surface/texture creation (orthomosaic, DSM/DTM), and analytic post-processing (volumetrics, NDVI, change detection). In 2025 each stage runs in a container with its own GPU profile. Datadog’s 2024 Cloud-Cost report shows organisations already spend 14 % of all EC2 compute on GPU nodes, up 40 % year-on-year—an uptick driven mainly by imaging and AI workloads. The best drone mapping app exploits spot-priced GPUs, queueing heavy dense-cloud jobs overnight in regions where A100 rates dip below USD 1.70 h⁻¹, while keeping quick orthomosaic prototypes local so the crew can eyeball seam lines before leaving site.
During alignment the app ingests the RTK lever-arm offsets recorded in field, then cross-checks tie-point residuals against the three or five ground-control points you set earlier. A 2025 comparative study found that five well-distributed GCPs cut horizontal RMSE to 1.6 cm even when RTK was enabled, but gains flatten beyond that point. Accordingly, the best drone mapping app flags any checkpoint whose residual exceeds the 1.5× median absolute deviation, letting the analyst accept, demote, or delete the suspect point before it poisons the bundle adjustment.
Once a dense cloud is born, the orthomosaic builder tiles images into GPU memory and writes cloud-optimised GeoTIFFs (COGs). If ground sampling distance was pegged at 2 cm px⁻¹, a 100-ha site weighs roughly 18 GB as a full-resolution TIFF. The app therefore auto-generates a pyramid at 8 cm and 32 cm for quick preview in thin-client GIS. What matters is that the best drone mapping app hides this housekeeping behind a single progress bar; sub-par platforms still expose arcane “generate overviews” dialogues that junior analysts forget to tick, causing multi-gigabyte transfers that choke VPN lines.
2 Quality-Control Logic in the Cloud
Speed means little if the outputs can’t survive an audit. The best drone mapping app pushes data into a cloud QC harness where checkpoint RMSE, tie-point density, and strip misalignment show up as red bars on a browser dashboard. Research in Drones (2025) confirms that algorithms exploiting both RTK metadata and weighted GCP residuals reduce reprojection error by 31% versus RTK-only solutions mdpi.com. If a metric crosses your tolerance, the app auto-spawns a patch job—a surgical re-solve on the offending strips—rather than forcing a full rebuild.
This continuous integration–style QC is the hidden labour saver. A forestry firm in British Columbia trimmed point-cloud rework from 7 h to 28 min per project by letting the best drone mapping app trigger automated patch jobs while the crew was still driving home, approving fixes from a phone once LTE returned. Time once wasted on manual Ground Control–PhotoScan gymnastics now drops through a web-hook straight into production.
3 Deliverable Logistics & API Hooks
Stakeholders rarely care about LAS files; they care about cut-fill volumes, stand counts, or wall-plumb deviation reports. The best drone mapping app therefore publishes a standard bundle:
- COG Orthomosaic
- LAZ Point Cloud (E57 optional)
- DSM/DTM
- Vector analytics (stockpile polygons, canopy masks, crack-length CSVs)
Formats align to open standards so that BIM suites, agronomy DSSs, or mine-planning platforms ingest them without translation. Emlid’s 2025 step-by-step RTK guide stresses that open deliverables cut end-to-end project time by 17 % through removal of format wrangling blog.emlid.com. The best drone mapping app wires each deliverable to a REST endpoint, pushing geodata into on-prem object storage, S3 buckets, or SharePoint libraries with expiring signed URLs. CIOs love this because security policy now lives in IAM, not forgotten FTP accounts.
Finally, analytics modules—crack detection on concrete, NDVI drift over orchards—run as server-side plug-ins. SPH Engineering’s 2025 outlook notes that AI post-flight analytics are accelerating defect detection and report generation, a trend that flatly shifts margin from sub-daily deliverables to near-real time sphengineering.com. The best drone mapping app keeps those modules containerised; when a new algorithm for peat-bog carbon stock estimation comes out, you drop a Docker image into the plug-in registry and the next dataset auto-processes with the new AI weights.
Post-processing used to be a bottleneck; today it is a background service whose efficacy depends entirely on how well your software schedules GPUs, enforces QA gates, and weaponises open APIs. If your current tool chain can’t hit sub-2 cm RMSE by dawn or push orthos into a BIM portal without human shepherding, it’s not the best drone mapping app—it’s a sunk-cost warning light. In the concluding section we will show why customising these cloud pipelines—and integrating them with your proprietary data warehouses—is precisely where A-Bots.com turns off-the-shelf competence into competitive moat.
Advanced Tricks: API Automation and AI Add-Ons
By 2025 the best drone mapping app no longer ends at an “Export GeoTIFF” button. It behaves like a serverless orchestration layer: flight metadata flows into webhooks; containers spin up on spot-priced GPUs; deliverables route themselves to SharePoint, BIM 360, or Agro-DSS without human clicks. This is possible only because the leading platforms expose mature REST and gRPC APIs—often mirroring the internal micro-services the vendor uses in its own cloud farm.
Consider orthomosaic generation. Instead of dragging images into a desktop wizard, you can POST a JSON job to an endpoint patterned after Esri’s /System/OrthomappingTools/GenerateOrthomosaic service; the best drone mapping app will relay the request, inject RTK lever-arms, and stream-back a signed URL once the GeoTIFF pyramid is ready. Teams that switched to fully headless orthomosaic calls cut average turnaround from 6 h to 1.9 h on 500-ha imagery sets developers.arcgis.com.
Automation does not stop at reconstruction. A growing crop of photogrammetry middleware—Pix4D Cloud, Agisoft Engine, various GraphQL wrappers—can now be daisy-chained with iPaaS hubs like ApiX-Drive, letting non-developers stitch together “image-upload → align → point-cloud QC → LAS push to S3” pipelines in a visual canvas apix-drive.com. The best drone mapping app acts as the authentication broker, generating one-time tokens so you never expose AWS keys to field tablets.
Below is a single playbook—use it as a template, fork it as required:
- Webhook trigger fires when the tablet finishes syncing raws.
- Lambda or Cloud Function parses EXIF, builds a job spec, and hits the mapping-app
/jobsendpoint. - GPU pod reconstructs dense cloud; on success, a callback posts QC metrics (RMSE, tie-point density) to a Grafana board.
- Second Lambda converts LAS ↦ E57 ↦ IFC (if construction) or tags NDVI tiles with block IDs (if agronomy), then uploads to your data lake.
- Teams/Slack bot posts “orthos live” with preview thumbnails; managers sign off without VPNing into the GIS.
That five-step loop lives entirely in APIs; the operator’s only job is to keep batteries charged—exactly what a best drone mapping app should enable.
AI Add-Ons: From Vision to Insight
Artificial-intelligence modules are now drop-in Docker images. DroneDeploy’s 2024 “AI Annotations” beta already detects rebar bundles, stockpile toes, and missing edge-protections directly on orthomosaics dronedeploy.com; agronomy-focused engines like FlyPix run YOLOv8 variants that classify individual maize plants and flag chlorosis hotspots with 94 % F-score flypix.ai. Because these plug-ins talk the same REST dialect as the core mapper, chaining them after reconstruction is a one-line job in the CI file.
Edge deployments are accelerating too. With NVIDIA Jetson Orin Nano boards under US $300, some operators now push a lightweight segmentation model to the drone itself, letting the best drone mapping app draw disease polygons before the aircraft lands. Backhaul bandwidth falls by 80 % because only masked crops, not full-res imagery, leave the site.
Bridging Legacy Silos
Of course, no CIO will green-light new tools if they fracture existing ERP or asset-management stacks. Industry guidance on API strategy stresses middleware or gateway layers to reconcile modern REST payloads with SOAP or JDBC back ends moesif.com. Forward-looking best drone mapping app vendors ship out-of-the-box connectors—Kafka sinks, OData feeds, SQL façades—so deliverables glide into legacy SCADA or Maximo without the spaghetti of cron dumps.
Why It Matters
API automation transforms drone teams from photo-takers into data-ops engines: zero-touch orthos, self-healing QC loops, AI detectors that surface issues while crews are still on-site. The net effect is fewer re-flights, faster billing cycles, and executive dashboards that populate themselves by the time Monday’s stand-up starts. If your current workflow still involves manual downloads or overnight DLL-based plugins, it is leaving margins on the table—and it is certainly not the best drone mapping app experience.
The concluding section will synthesize these gains and explain how A-Bots.com engineers extend the same automation patterns into fully bespoke drone-mapping stacks—so the APIs, not the pilots, do the heavy lifting.
Beyond Off-the-Shelf: Custom Drone-Mapping Apps
The commercial ecosystem has reached an inflection point: off-the-shelf platforms now stitch milliards of pixels every day, yet many operators still juggle half-a-dozen tools to satisfy niche sensor payloads, granular QA rules, or legacy data lakes. Construction firms, for example, often bounce between ArcGIS Flight for capture and separate BIM viewers for analytics, adding human latency to every hand-of esri.com. Energy majors see similar friction—Shell’s 2025 pipeline-inspection program linked three vendors with bespoke scripts before reaching a digital-twin dashboard innovateenergynow.com. The pattern is clear: software maturity has outpaced integrability, and the teams piloting the “drone mapping app” today will need deeper tailoring tomorrow.
Why One-Size Fails at Scale
Regulatory turbulence alone can break packaged workflows. The impending FAA Part 108 BVLOS rule and its EU SORA equivalents attach new telemetry and detect-and-avoid logging duties that older SDKs never anticipated commercialuavnews.com. Add specialty sensors—dual-band SWIR for vegetation stress, GPR for ballast inspection—and even the slickest commercial suite becomes a patchwork of CSV exports. When every minute between landing and insight affects permit deadlines or sprayer schedules, those seams translate directly into cost overruns.
Building on Open Foundations
Fortunately, 2025 is also the year open-source photogrammetry reached enterprise grade. Projects such as OpenDroneMap and its WebODM web layer expose modular CLI hooks that let developers swap in AI denoisers, GPU schedulers, or domain-specific analytics at will. Independent benchmarks list ODM alongside commercial titans in accuracy tables, while Dockerised builds slot neatly into Kubernetes clusters datumate.com. Community workflows already chain ODM outputs to YOLO-based object counters for crop or stock-yard inventory, proving that custom logic no longer requires green-field coding twomile.com.
What a Tailor-Made Stack Unlocks
Below is a single snapshot of capabilities unlocked when you move beyond off-the-shelf and weave your own best drone mapping app around open APIs and modular AI:
- Sensor-agnostic capture → edge AI inference → cloud QC → ERP push in one zero-click pipeline, with every stage governed by your IAM and KPI dashboards.
That consolidated path eliminates duplicate uploads, slashes GPU idle time, and preserves a single audit trail—impossible to replicate with loosely coupled SaaS.
ROI That Compounds
A mid-Atlantic AEC firm recently replaced three overlapping subscriptions with a custom ODM-centric stack; by embedding change-detection AI directly into their Kubernetes jobs they shaved twelve hours off every weekly volume report and cut annual licence spend by 38 %. Meanwhile, operators on Shell’s autonomous inspection routes report two-day turnaround for digital-twin updates—half the 2024 baseline—after swapping manual ETL for webhook-driven LAS→BIM conversion innovateenergynow.com. These savings compound: faster QA means fewer re-flights, tighter cashflow, and leaner headcount in the data-ops lane.
The A-Bots.com Advantage
Designing such a stack takes more than API keys; it demands fluency in flight-stack SDKs, container orchestration, photogrammetric math, and domain-specific governance. A-Bots.com pairs full-cycle mobile expertise with GIS, cloud-native and machine-vision engineers to fuse those layers into a cohesive, future-proof platform. Whether you need real-time NDVI on the edge, BVLOS-ready telemetry compliance, or direct LAS ingestion into an ERP, our architects blueprint, code and deploy the bridgework—leaving pilots to fly and stakeholders to decide.
Bottom line: when off-the-shelf ceilings start capping productivity, a custom solution turns the “best drone mapping app” from a purchase into a proprietary advantage—and A-Bots.com can develop a tailored drone mapping app that does exactly that.
✅ Hashtags
#DroneMapping
#BestDroneMappingApp
#Photogrammetry
#Surveying
#GIS
#ConstructionTech
#DroneSoftware
#ABots
Other articles
ArduPilot Drone-Control Apps ArduPilot’s million-vehicle install-base and GPL-v3 transparency have made it the world’s most trusted open-source flight stack. Yet transforming that raw capability into a slick, FAA-compliant mobile experience demands specialist engineering. In this long read, A-Bots.com unveils the full blueprint—from MAVSDK coding tricks and SITL-in-Docker CI to edge-AI companions that keep your intellectual property closed while your drones stay open for inspection. You’ll see real-world case studies mapping 90 000 ha of terrain, inspecting 560 km of pipelines and delivering groceries BVLOS—all in record time. A finishing 37-question Q&A arms your team with proven shortcuts. Read on to learn how choosing ArduPilot and partnering with A-Bots.com converts open source momentum into market-ready drone-control apps.
Otter.ai Transcription and Voice Notes Discover how to turn every meeting, interview, or conversation into actionable business insights with Otter.ai. This in-depth guide covers every aspect of otter ai transcription, from setting up your workspace to automating workflows and integrating with business tools. You’ll learn not only how to use otter voice meeting notes for seamless team collaboration, but also advanced tips, customization, and automation scenarios for real-world productivity. Looking for something even more tailored? Find out how A-Bots.com can develop a custom AI-powered solution—from voice to text pipelines to intelligent chatbots—built to the exact needs of your business or industry.
QGroundControl vs Mission Planner | A-Bots.com Guide Which cockpit wins in 2025—QGroundControl or Mission Planner? This long-read dissects search analytics, feature benchmarks and Remote-ID hurdles, then maps A-Bots.com’s blueprint for turning either open-source ground station into a white-label, FAA-ready drone-control app tailored to your fleet.
ArduCopter Apps by A-Bots.com - Custom Drone Control 2025 Need industrial-grade drone control? Our engineers fuse ArduCopter with React-Native UX, SITL-driven QA and Azure telemetry—so your multirotor fleet launches faster, stays compliant, and scales from mine shafts to city skies.
PX4 vs ArduPilot This long-read dissects the PX4 vs ArduPilot rivalry—from micro-kernel vs monolith architecture to real-world hover drift, battery endurance, FAA waivers and security hardening. Packed with code samples, SITL data and licensing insights, it shows how A-Bots.com converts either open-source stack into a certified, cross-platform drone-control app—ready for BVLOS, delivery or ag-spray missions.
Top stories
Copyright © Alpha Systems LTD All rights reserved.
Made with ❤️ by A-BOTS