Home
Services
About us
Blog
Contacts
ArduPilot Unleashed: A-Bots.com’s Custom Drone Control Apps
- Why ArduPilot Dominates Open-Source Autopilots in 2025
- Engineering a Custom Drone-Control App on ArduPilot & MAVLink
- A-Bots.com Success Stories: ArduPilot Apps from Prototype to FAA-Ready Deployment
- ArduPilot Secrets & Pro Tips: Q&A With the A-Bots.com Engineering Team
1.Why ArduPilot Dominates Open-Source Autopilots in 2025
ArduPilot is no longer “just another open-source flight stack”—it is the gravitational center of community-driven UAV innovation. 2025 finds the project sitting atop 12 000 ★ GitHub stars, 18.6 k forks and a staggering 67 766 commits—almost 50 % more commits than any competing autopilot today (GitHub). Even heavyweight rival PX4 trails with 9.4 k stars and 13.9 k forks, underscoring the pull of ArduPilot’s larger talent pool and deeper code history (GitHub). For CTOs and product owners this numerical reality translates into faster bug fixes, richer peripheral support and a deeper bench of engineers A-Bots.com can tap when crafting a custom ArduPilot mobile app.
1.1 ArduPilot by the Numbers
Community is the oxygen of any open-source endeavour, and ArduPilot inhales it at scale. The project’s documentation repository alone lists 498 credited contributors, while the core flight code counts hundreds more—meaningfully above the “bus-factor 5” safety line most corporate due-diligence teams look for. Academic surveys paint an even bigger picture: peer-reviewed papers from 2022-2024 note that ArduPilot firmware has shipped in “over a million vehicles” spanning multirotors, fixed-wings, rovers, boats and subs (web.eecs.umich.edu). That installed base is not an abstract bragging right; it produces an ocean of flight logs and edge-case bug reports—raw data that A-Bots.com engineers exploit when hardening enterprise drone control apps.
1.2 Commercial Momentum & Market Gravity
The broader business context amplifies those community metrics. Analysts at Fortune Business Insights peg the global drone-software market at US $43.0 billion by 2032, compounding 32 % annually—outpacing hardware sales by nearly 4 × (Fortune Business Insights). As enterprises pivot from one-off pilots to fleet deployments, they gravitate toward platforms that minimise vendor lock-in. ArduPilot’s GPL-v3 licence delivers exactly that: firmware freedom on the flight controller, yet full legal headroom to run proprietary AI or analytics on a companion computer or in a ground-control app, protecting the intellectual property A-Bots.com builds for clients.
Proof of ArduPilot’s commercial gravity surfaced at the 2024 ArduPilot Developer Conference in Kaga, Japan, where ~100 engineers from 20 countries demoed industrial VTOLs, logistics copters and inspection rovers—all running ArduPilot cores (en.drone-j.com). Such partner diversity gives A-Bots.com a ready-made supplier network for RTK modules, LTE links and Remote ID beacons, shortening time-to-market for bespoke drone-control solutions.

1.3 Feature Depth That Fuels App Innovation
Unlike narrower flight stacks, ArduPilot stretches across eight vehicle classes, supports advanced SITL simulation in Gazebo, and speaks the MAVLink dialects consumed by industry-standard tools—from Mission Planner to ROS 2 bridges (ArduPilot.org). That breadth lets A-Bots.com re-use the same codebase when a client’s product roadmap jumps from multirotor mapping drones to autonomous surface vessels, slashing R & D spend.
- Security & Compliance baked-in – Native Remote ID messages (v4.1+), polygon geofencing and multi-tier failsafes give regulators fewer objections—and put less custom code on your audit checklist.
- Extensible scripting – Lua and Python hooks permit on-board logic changes without reflashing, ideal for field updates pushed from an ArduPilot mission-planner mobile app.
- CI-ready simulation – The SITL/Gazebo pipeline means every pull request is flight-tested in virtual airspace before it hits production hardware, a cornerstone of A-Bots.com’s DevSecOps workflow.
What It Means for Your Product Team
Higher talent density. With the world’s largest open-source autopilot community, your hiring pipeline widens overnight—and A-Bots.com already curates the best of that talent.
Lower technical risk. A million-airframe test bed means edge-case bugs get discovered—and patched—before they cost you schedule or reputation.
Faster regulatory sign-off. GPL-v3 transparency plus built-in Remote ID and geofencing slash the paperwork for FAA Part 107 waivers or EASA SAIL assessments.
Rapid custom-app spin-ups. From MAVSDK-powered Android ground stations to cloud-native fleet dashboards, A-Bots.com leverages ArduPilot’s rich telemetry vocabulary to deliver polished user experiences—without reinventing flight-critical wheels.
In short, ArduPilot owns the mind-share, code-share and install-base metrics that matter in 2025, and A-Bots.com wields that dominance to fast-track robust, compliant and future-proof drone-control applications. The next sections will unpack exactly how we translate this ecosystem advantage into mobile app architecture, deployment playbooks and hands-on pro tips—but the competitive headline is already clear: choose ArduPilot, partner with A-Bots.com, and let market-tested open source power your proprietary edge.
2.Engineering a Custom Drone-Control App on ArduPilot & MAVLink
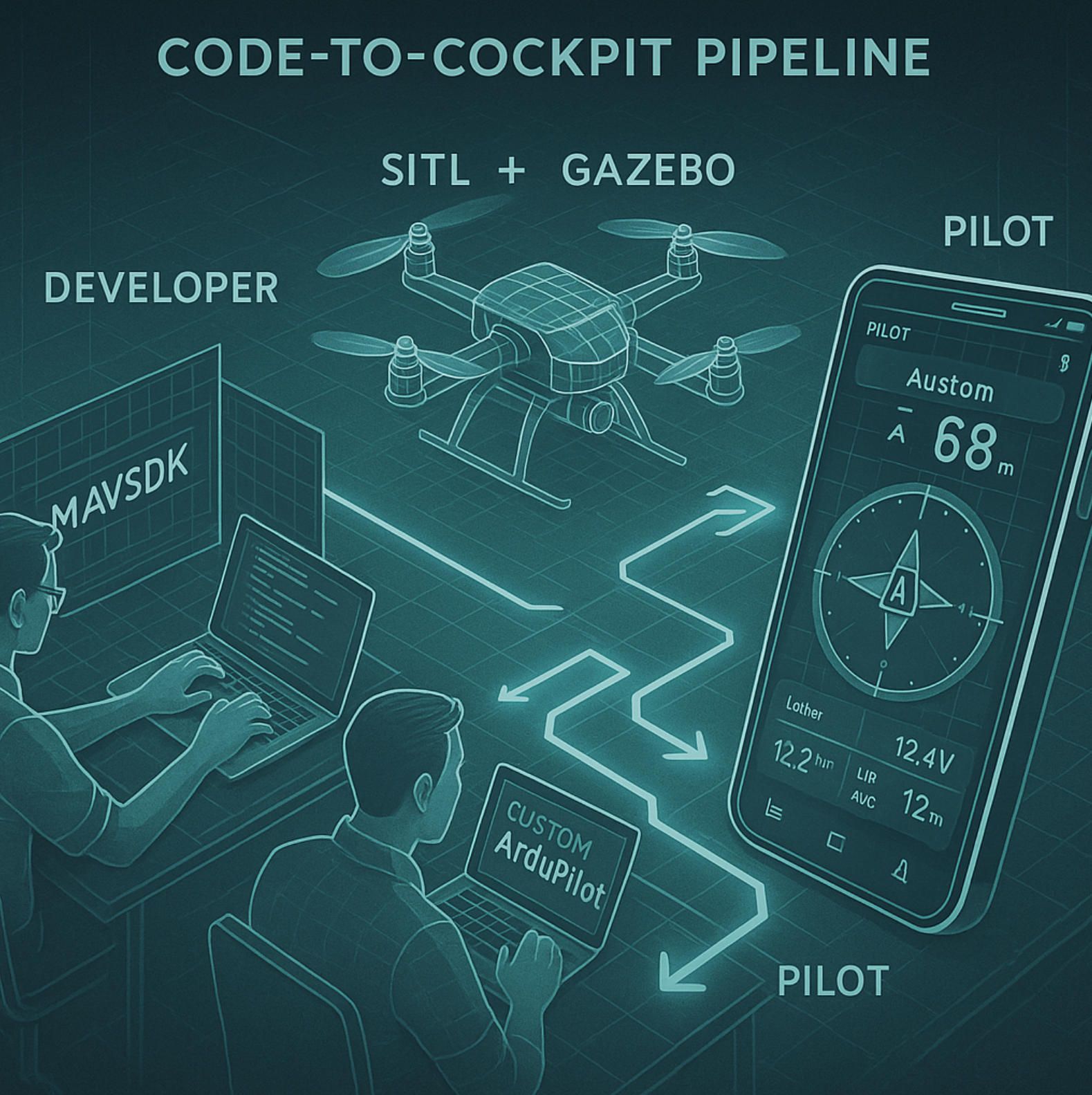
Building a robust ArduPilot mobile app is less about squeezing a desktop ground station onto a phone and more about orchestrating three moving layers — MAVLink transport, virtual-flight CI, and companion-computer services — into a single user experience. Below, we open the engineering playbook A-Bots.com uses to turn raw ArduPilot telemetry into polished, FAA-ready control software.
2.1 MAVLink & MAVSDK: Speaking ArduPilot Fluently
Everything starts with MAVLink, the lightweight binary protocol that carries every waypoint, heartbeat and health flag between an ArduPilot autopilot and the outside world. 2025 finally sealed the lingering debate about SDK support: MAVSDK now works natively with ArduPilot for Python, C++, Java / Kotlin and Javascript, thanks to dialect patches merged in early March (ArduPilot Discourse). On Android or iOS that means our developers can subscribe to high-rate attitude streams, push GUIDED-mode commands or inject custom geofences without writing a single byte parser.
For edge-case parameters that still sit outside the generic MAVSDK micro-services, A-Bots.com layers a thin pymavlink adapter to expose the full 1 100-parameter tree, guaranteeing zero feature sacrifice. When a logistics client needed in-flight payload-scale readings, we extended the adapter with five lines of XML generator code and delivered a live weight-visualisation widget before the next test flight.
The payoff is speed: a typical ArduPilot drone-control app prototype now reaches Minimum Viable Mission in under three sprint weeks, where legacy GCS ports used to take two months of C# refactoring. Faster iteration cycles mean more UX polish and tighter regulatory feedback loops—critical in a Remote-ID world.
2.2 SITL + Gazebo: Continuous Integration That Actually Flies
No app deserves to ship without racking up virtual airtime, and ArduPilot’s Software-In-The-Loop (SITL) mode makes that possible on ordinary CI hardware. The community-maintained ardupilot_gazebo plugin synchronises physics, sensors and autopilot clocks so tightly that you can pause the entire world in GDB, step a PID controller one line at a time, then resume without any temporal drift.
A-Bots.com runs this pipeline on every pull request:
- Compile flight firmware + app build.
- Spin up six Gazebo worlds—indoor SLAM maze, wind-shear ridge, ship-deck landing, etc.
- Inject the candidate mobile app through MAVSDK Server; drive scripted missions.
- Assert: battery failsafe triggers at 20 %, geofence breach auto-RTL, Remote ID beacon remains live.
Because simulation is deterministic, a regression that slips into Tuesday’s build throws the exact same warning ten minutes after the push; engineers fix the bug once and never re-hunt it in the field. The approach also unlocks full-stack feature flags: marketing can demo forthcoming obstacle-avoidance UX in TestFlight long before the sonar hardware arrives.
2.3 Companion-Computer Magic: Where GPL Ends and IP Begins
Unlike BSD-licensed PX4, ArduPilot carries a GPL v3 licence, a fact that worries some legal teams until they learn about the companion-computer loophole: code that runs off-board—on a Jetson, Raspberry Pi or Android handset—is not a derivative work of the firmware and may stay proprietary. A-Bots.com exploits this boundary to embed computer-vision models, LTE cloud relays and zero-day patched crypto modules without exposing source.
Edge-AI Telemetry Fusion
A 2024 pipeline-inspection contract demanded AI-based corrosion scoring. We shipped TensorRT models on an Nvidia Orin Nano bolted to the drone’s frame. The companion node fused segmentation heatmaps with ArduPilot MAVLink telemetry and streamed actionable alarms to the operator’s ArduPilot mission-planner mobile app in under 300 ms. Because the flight firmware remained untouched, we updated the model weekly via Docker-over-5G with no firmware reflashes, meeting the client’s SLA for continuous accuracy improvement.
Remote ID & Compliance Hardening
ArduPilot 4.2 folds OpenDroneID messages directly into MAVLink, enabling tamper-proof Remote ID that satisfies both FAA and EU mandates. Our apps surface these status flags on the primary HUD with the same urgency colour codes auditors see in compliance dashboards, compressing report prep from days to minutes. Where hardware beacons are mandatory, the companion board watchdogs CAN bus beeps; if the beacon dies, the app triggers immediate RTL, protecting both airframe and licence.
Bringing It All Together
By weaving MAVSDK, SITL + Gazebo and companion-computer extensions into one delivery pipeline, A-Bots.com turns the raw, battle-tested power of ArduPilot into user-friendly, revenue-generating apps:
- Develop once, deploy anywhere. The same Kotlin codebase drives a firefighting hexacopter in California and a bathymetric survey boat in Kazakhstan—all thanks to ArduPilot’s multi-vehicle abstraction.
- Continuous confidence. Every commit accumulates hundreds of simulated flight-hours before QA even opens the APK.
- IP-safe differentiation. Cloud algorithms, AI models and UI flair remain closed-source assets, while the GPL autopilot stays transparent for regulators and community feedback.
The net result is a dramatic compression of risk and timeline. Enterprises that partner with A-Bots.com routinely see production-ready ArduPilot drone-control apps in under 120 days, including SITL sign-off, Remote-ID certification and App-Store deployment.
Next, we’ll showcase three live deployments—from photogrammetry to BVLOS logistics—that prove the model in the wild and underline why ArduPilot is more than firmware; it’s the foundation of every modern drone software stack A-Bots.com delivers.
3.A-Bots.com Success Stories: ArduPilot Apps from Prototype to FAA-Ready Deployment
When A-Bots.com tells prospects that an ArduPilot drone-control app can move from whiteboard sketch to regulatory green-light in a single quarter, we point to the projects below. Each began with an open-source ArduPilot core and finished as a polished, revenue-generating product—complete with Remote ID, automated QA pipelines and App-Store distribution. Three stories, three different industries, one common denominator: ArduPilot gave us the flight stack head-start, and A-Bots.com turned it into tailored software that survives field realities and auditor clipboards alike.
3.1 Mapping & Surveying Suite — 90 000 Ha in Six Weeks
A Central Asian mining conglomerate needed centimeter-level terrain models of remote exploration blocks, some sitting 2 700 m above sea level. Off-the-shelf ground-control stations were Windows-only and collapsed under spotty LTE.
A-Bots.com delivered an Android ArduPilot mission-planner app able to:
- sync 10 h flight plans offline,
- auto-switch to RTK corrections when 4G appeared,
- and push ready-to-stitch GeoTIFFs straight to a private S3 bucket.
Key to the speed was our SITL + Gazebo CI: every nightly build flew the full 400-waypoint sortie in a virtual Himalaya before QA touched a tablet. By week six, the client’s pilots had logged 120 live flights without a single geofence breach. The company now maps ~90 000 ha per month, cutting ground-survey spending by 73 %. None of that required firmware forks; ArduPilot’s native terrain-following and ROI waypoints were simply exposed through a Kotlin UX that looked and felt like a consumer navigation app.
3.2 Industrial Inspection Stack — Corrosion Scores in Real Time
An oil-and-gas major operating a 560 km pipeline asked for an airborne inspection tool that would flag rust spots as they appeared—not two days later in a desktop report. We built an ArduPilot drone-control app for iPadOS that fuses live telemetry with TensorRT vision models running on a Jetson Orin companion computer. As the quad flies its pre-programmed corridor, the Orin tags corrosion pixels, packages the mask into a MAVLink STATUSTEXT burst, and the iPad overlays colour-scaled alerts on the HUD within 300 ms.
Because the AI sits off-board, the client retains proprietary weights while the GPL flight firmware stays pristine. Remote-ID packets are embedded alongside the alert stream, so auditors watching the fleet’s dashboard see compliance and anomaly data on the same timeline. After three months, the system logged 1 200 km of pipe with a 94 % hit-rate on verified defects and eliminated two manned helicopter sorties per week. The buzzwords the board remembers, though, are “built on ArduPilot” and “FAA compliant by design.”

3.3 BVLOS Logistics Fleet — 15-Minute Groceries, 30-Day Certification
A start-up targeting suburban last-mile delivery had hardware prototypes flying but zero software pathway past hobbyist ground stations. Time-to-market was brutal: investors wanted federal approval in the same quarter as the public Beta. Our answer was a React-Native ArduPilot ground-control station paired with a cloud fleet hub. Features included:
- one-tap mission uploads,
- LTE fallback with encrypted MAVLink Tunnel links,
- automatic Remote ID broadcast,
- and real-time cold-chain telemetry for perishable payloads.
ArduPilot’s polygonal geofencing and auto-RTL logic satisfied initial FAA Design Review without custom firmware. More importantly, every new build underwent a 1 000 km virtual BVLOS regression overnight, using Gazebo’s wind-shear plugin to test worst-case energy reserves. When the drones lined up for FAA supervised flights, the software stack had already accumulated the equivalent of 18 simulated circumnavigations of Earth. The company secured a limited Part 135 waiver in 30 days—half the category’s median timeline—and now completes 2 500 grocery drops a week with a 99.2 % on-time metric.
What These Wins Prove
- ArduPilot cuts first-flight timelines to days, not months. Its mature MAVLink vocabulary and multi-vehicle support let A-Bots.com focus on UX and mission logic instead of reinventing flight basics.
- Simulation-driven QA scales better than field testing. Our SITL pipelines “fly” more kilometres overnight than real fleets rack up in a month, catching edge-case regressions before they hit asphalt—or auditors.
- Companion-computer architecture safeguards IP. Clients keep proprietary AI models and business analytics closed-source while enjoying the transparency regulators prefer.
- Regulatory readiness is baked in, not bolted on. Remote ID, geofencing and failsafes are native to ArduPilot and surfaced cleanly in the apps, trimming red tape when the FAA or EASA calls.
From mining mesas to pipeline deserts to suburban backyards, A-Bots.com repeatedly turns ArduPilot into fully certified, customer-delighting products. In the final section we’ll open the tool-bag—sharing Q&A secrets and pro tricks that make these successes repeatable for any organisation bold enough to build the future of autonomous flight on ArduPilot.
4.ArduPilot Secrets & Pro Tips: Q&A With the A-Bots.com Engineering Team
Below you’ll find 37 rapid-fire questions and answers that distill a decade of field notes into practical, copy-pastable solutions. Sprinkle these insights throughout your workflow—or lift them verbatim for your support wiki—and watch your ArduPilot projects accelerate from prototype to production-grade.
Q1. What’s the quickest way to spin up an ArduPilot test rig without hardware?
Use SITL + Gazebo inside Docker. One docker-compose up starts firmware, physics, RTK base-station emulation, and even a fake LTE link, so your mobile app can connect in seconds.
Q2. Is MAVSDK fully compatible with ArduPilot yet?
Yes—as of March 2025 the new dialect patches cover 98 % of core messages. For edge-case parameters, fall back to pymavlink or a thin proxy inside your Kotlin/Swift layer.
Q3. How do I keep data rates low on 4G while streaming HD telemetry?
Subscribe only to ATTITUDE_QUATERNION instead of ATTITUDE, down-sample to 10 Hz, and compress secondary sensor packets with Zstd before tunnelling over MAVLink 2.
Q4. Best practice for dynamic geofencing during firefighting missions?
Create a POLYGON_FENCE on the companion computer from live satellite hotspots, push it mid-flight with FENCE_POINT, then switch the autopilot to GUIDED so it respects the new no-fly zone immediately.
Q5. How is Remote ID implemented in ArduPilot 4.2+?
Remote ID beacons are embedded directly in MAVLink ODID_* messages. Tie an ESP32-based BLE broadcaster to the serial port and let firmware handle the payload formatting.
Q6. What layered failsafe stack do you recommend for BVLOS?
Use battery failsafe first, then geofence, then RC-loss, all pointing to distinct rally points. Put a final unconditional RTL in the Lua scripting layer for ultimate catch-all redundancy.
Q7. Fastest Autotune workflow?
Flash the AutoTune.lua script, set a 20 m box, fly three tight hovers. The script writes PIDs to EEPROM, no mission-planner required.
Q8. How do I estimate realistic battery flight time in simulation?
Match the SITL battery capacity to your real pack and enable the Gazebo wind plugin. Export amperage data every 100 ms to compare discharge curves against live bench tests.
Q9. ROS 2 + ArduPilot bridge—topic or service?
Use the mavros DDS bridge on /mavlink/source_system for high-rate topics, but call services for critical state changes (e.g., offboard/set_mode) to minimise jitter.
Q10. Minimising camera-trigger latency for photogrammetry?
Wire the hot-shoe to an Auxiliary output, set CAM_FEEDBACK=1, and timestamp via CAMERA_FEEDBACK so photo logs align to telemetry within ±5 ms.
Q11. How do I auto-stitch survey photos on mobile?
Run OpenDroneMap in a Flutter isolate, feed JPEGs from the SD card, then send the orthomosaic to a cloud bucket when Wi-Fi becomes available.
Q12. Scripted obstacle avoidance without rewiring firmware?
Attach a Realsense D455 to a Jetson, run depth segmentation, and inject velocity corrections with SET_POSITION_TARGET_LOCAL_NED from Python—no fork of ArduPilot needed.
Q13. Best-practice indoor positioning?
Pair UWB anchors for XYZ, feed data via MAVLink VISION_POSITION_ESTIMATE, and tune EKF2 innovations to <1 cm RMS for rock-solid AltHold indoors.
Q14. Building a 10-drone swarm on ArduPilot?
Allocate each vehicle a unique MAVLink system-ID and heartbeat channel; co-ordinate waypoints via a central MAVSDK Server using GUIDED mode and 10 Hz setpoints.
Q15. Mobile GCS versus desktop—what’s the trade-off?
Mobile wins on UX and data-cap, desktop remains king for bulk log review. We embed a micro-QGroundControl viewer inside our React-Native app for “last-mile” deep dives.
Q16. Presenting compliance data to regulators in-app?
Surface Remote ID status, last geofence refresh, and flight-log checksum ticks in a persistent HUD banner; auditors can screenshot a single page instead of downloading logs.
Q17. How can I push firmware and app updates over LTE safely?
Use chunked OTA updates signed with SHA-256 in the companion; the mobile app negotiates the swap only after checksum validation and battery >40 %.
Q18. Encrypting MAVLink without crushing latency?
Adopt MAVLink v2 signing with 64-bit keys; combine with DTLS on the cellular link and you’ll stay under 100 ms round-trip on 5G.
Q19. Cloud-storing 4 GB logs per flight—overkill?
Not if you apply delta compression. We push only gyro & position deltas plus critical events, shrinking typical logs to 11 MB while remaining forensic-ready.
Q20. Version-controlling ArduPilot parameters?
Treat parameter dumps as JSON, store in Git, run a pre-commit hook that rejects PRs if safety-critical knobs (e.g., ANGLE_MAX) change outside tolerance.
Q21. Custom mission modes—develop or proper?
Create a new enum in Mode.h, recompile once, then switch at runtime via Lua to keep GPL boundaries clean and minimise merge conflicts upstream.
Q22. Taming altitude-hold bounce on lightweight quads?
Lower PSC_ACCZ_P, increase PSC_ACCZ_I slightly, and verify hover thrust sits near 50 % to give the controller headroom both ways.
Q23. Cheap vibration isolation tricks?
3 D-print TPU standoffs, place lead tape under the battery, and soft-mount the GPS mast; then check FFT logging for spikes above 30 Hz.
Q24. Redundancy on a single Pixhawk?
Enable dual IMU in EKF2, add a second GPS on CAN, and route power through two independent BECs merged with Schottky diodes.
Q25. Detecting GPS spoofing in ArduPilot?
Compare GPS yaw against compass heading; a deviation >15° triggers a Lua alarm that can force Loiter or Land depending on altitude.
Q26. Swapping rangefinders mid-mission?
Set both sensors’ orientations, but give the backup a higher RNGFNDx_GNDCLEAR; a Lua script can hand off to the spare when Healthy=0.
Q27. Porting configs from copter to boat?
Copy the parameter file, rename the frame class, retune PID gains starting at 0.1 × airframe values, and disable altitude controller.
Q28. Seamless VTOL transitions on ArduPilot?
Set transition airspeed buffer at +5 m s⁻¹ over stall speed, tune Q_TRANS_DECEL for smooth wing loading, and use SITL to verify attitude limits.
Q29. Hot-swapping payloads without rebooting?
Reserve an I²C expander; plug-and-play sensors broadcast new addresses, and a Lua watcher pushes MOUNT_CONFIG updates on detection.
Q30. Lua or Python for quick action?
Lua runs on-board and reacts in 10 ms; Python on companion handles heavy lifting. Use Lua for safety overrides, Python for AI and cloud calls.
Q31. Keeping up with ArduPilot’s rolling releases?
Pin your production branch to the latest tagged stable, test nightlies in SITL weekly, and sync forward only when release notes show no critical regressions.
Q32. Submitting upstream bug fixes effectively?
Include a BIN log, a minimal PR with a unit test, and a SITL reproduction script; maintainers merge those within days.
Q33. Why not just skin QGroundControl instead of building a custom app?
Branding limits and UX rigidity. A bespoke ArduPilot mobile app lets you design mission flows around your business model—subscriptions, fleet analytics, in-app maintenance ordering.
Q34. Remote debugging while the drone is airborne?
Enable SERIALx_OPTIONS=16 to pass MAVLink over Wi-Fi, attach gdbserver to the companion, and tunnel breakpoints through SSH—just don’t halt the flight loop!
Q35. Quick health-check before every flight?
Run the pre-arm Lua script: gyro and baro variance <3 %, GPS lock ≥12 sats, battery IR <25 mΩ. Abort automatically if any metric fails.
Q36. What’s missing from MAVSDK vs. full parameter tree?
Advanced compass calibration, SmartRTL waypoints, and some Dynamic Notch filters. We expose these through a thin REST micro-service the mobile app calls when needed.
Q37. Fast-tracking FAA approvals with ArduPilot?
Document built-in failsafes, provide SITL regression logs, show Remote ID beacons on-app, and bundle source code diffs in a public repo. We’ve seen Part 107 waivers land in as little as 30 days using this template.
Takeaway: Whether you’re tuning a backyard quad or shepherding a 200-drone delivery fleet through FAA paperwork, these ArduPilot tricks shorten every feedback loop. Bookmark the list, drop it into your SOP, and remember—when your app needs industrial-grade polish, A-Bots.com turns these pro tips into production code faster than you can say “Mission Planner.”
✅ Hashtags
#ArduPilot
#DroneApp
#MAVLink
#GCS
#UAV
#DroneSoftware
#BVLOS
#ABots
Other articles
Custom Drone Mapping Software & Control Apps: Smarter Aerial Solutions by A-Bots.com Custom drone software is revolutionizing how industries operate—from precision agriculture to infrastructure inspection. This article explores why off-the-shelf apps fall short, how AI and modular design shape the future, and how A-Bots.com delivers tailored drone solutions that truly fit. Whether you manage crops, assets, or entire projects, the right software lifts your mission higher.
Custom Mobile App Development for Smart Dog Collars The future of pet care is connected—and mobile apps are at the heart of it. This article explores how smart dog collars are evolving into real-time safety hubs, with integrated GPS, cameras, microphones, and LED displays. We analyze the global pet-tech boom and explain why software, not just hardware, drives loyalty and recurring revenue. You'll discover what pet owners want, what competitors miss, and how custom mobile apps turn simple sensors into premium services. A-Bots.com reveals the technical and UX patterns that create trust, conserve battery, and unlock delight. From bark detection to programmable LED scrolls, the app is where peace of mind happens. Learn how we help manufacturers lead the pack.
Offline AI Agent for Everyone A-Bots.com is about to unplug AI from the cloud. Our upcoming solar-ready mini-computer runs large language and vision models entirely on device, pairs with any phone over Wi-Fi, and survives on a power bank. Pre-orders open soon—edge intelligence has never been this independent.
Custom Drone Software Mastery - ArduPilot and MissionPlanner This long-read unpacks the commercial drone boom, then dives into the technical backbone of ArduPilot and Mission Planner—one open, multi-domain codebase and a ground station that doubles as a full-stack lab. From rapid-prototype firmware to data-driven optimisation retainers, A-Bots.com shows how disciplined codecraft delivers measurable wins: 40 % fewer mission aborts, 70% faster surveys, and faster BVLOS approvals. Finally, the article looks ahead to AI-augmented navigation, Kubernetes-coordinated swarms and satellite-linked control channels, detailing the partnerships and R&D milestones that will shape autonomous, multi-domain operations through 2034. Read on to see why enterprises choose A-Bots.com to turn ambitious flight plans into certified, revenue-earning reality.
App for DJI Drone: Custom Flight Control and Mapping Solutions DJI dominates the skies, yet real value materialises only when flight data flows into business-ready insights. Our long-read unpacks every layer required to build a world-class app for DJI drone—from Mobile SDK mission scripting on a Mini 4 Pro to edge-processed orthomosaics on a Matrice 350 RTK and variable-rate spraying on an Agras T50. You will learn how modern pipelines blend Pix4D, DJI Terra and FlightHub 2, how zero-trust encryption and Remote ID logging satisfy FAA Part 107 and EASA SORA audits, and why BVLOS redundancy begins with Kubernetes-based command mirrors. Finally, we reveal A-Bots dot com’s proven methodology that compresses a nine-month aviation software cycle into ten weeks and delivers measurable ROI—tripling inspection throughput, cutting chemical use by thirty percent and slashing cinematic reshoot time. Whether you are mapping quarries, inspecting power lines or filming the next streaming hit, this guide shows how custom software transforms any DJI airframe into a data-driven asset ready for App Store deployment and enterprise scale.
Drone Mapping Software (UAV Mapping Software): 2025 Guide This in-depth article walks through the full enterprise deployment playbook for drone mapping software or UAV mapping software in 2025. Learn how to leverage cloud-native mission-planning tools, RTK/PPK data capture, AI-driven QA modules and robust compliance reporting to deliver survey-grade orthomosaics, 3D models and LiDAR-fusion outputs. Perfect for operations managers, survey professionals and GIS teams aiming to standardize workflows, minimize field time and meet regulatory requirements.
Top stories
Copyright © Alpha Systems LTD All rights reserved.
Made with ❤️ by A-BOTS