Home
Services
About us
Blog
Contacts
Qwen Robot Suite and the Future of Embodied AI: When Artificial Intelligence Leaves the Screen
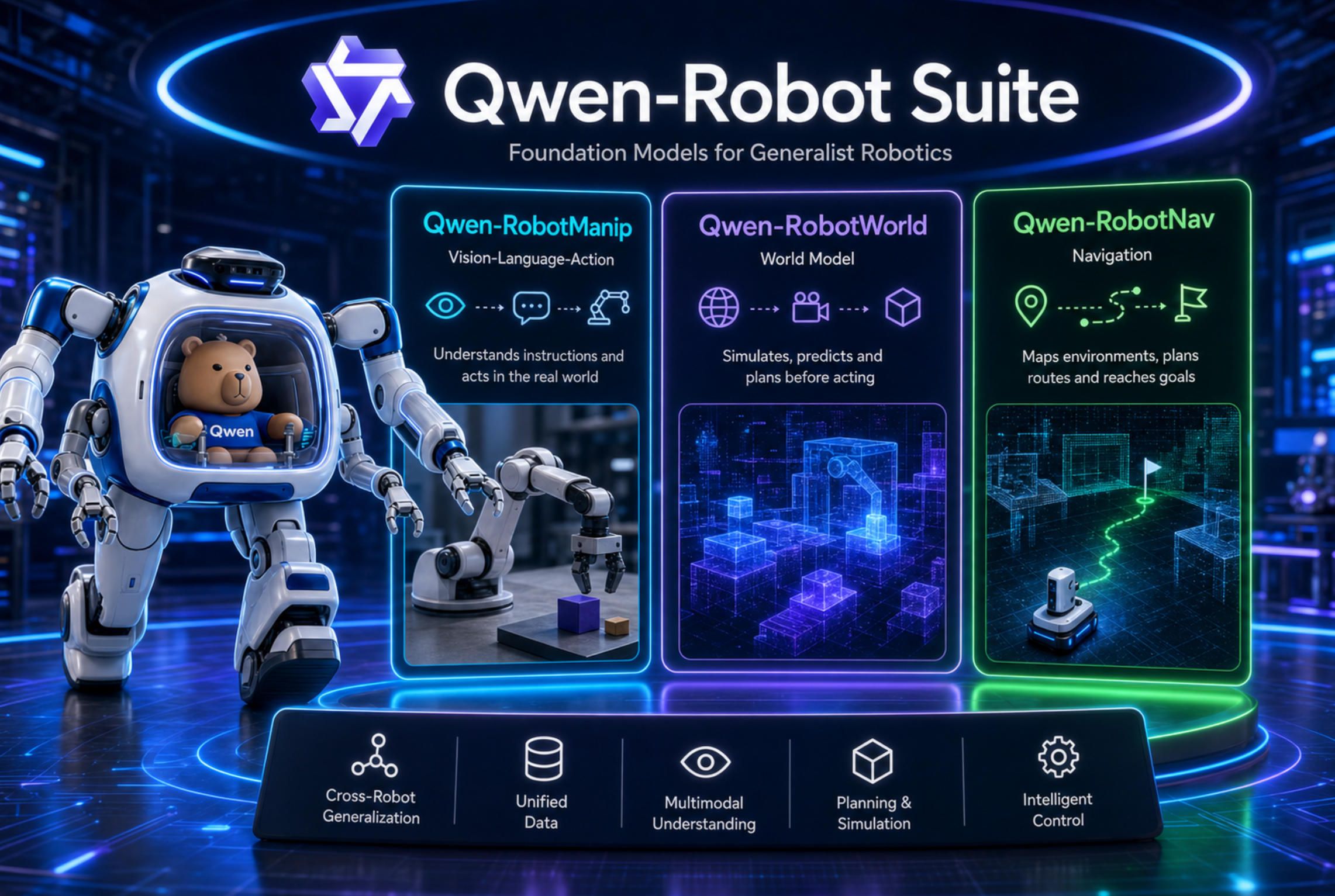
For most people, the recent AI revolution still lives behind glass. A user types a request, a model returns words, code, an image, or a video, and nothing in the physical environment changes unless a person acts on the answer. Alibaba’s Qwen Robot Suite is an attempt to break that boundary. It does not merely give a chatbot a robot body. It divides physical intelligence into complementary capabilities: Qwen-RobotNav decides how a machine should move through space, Qwen-RobotWorld predicts how a scene may change, and Qwen-RobotManip converts perception and instructions into physical actions. (qwen.ai)
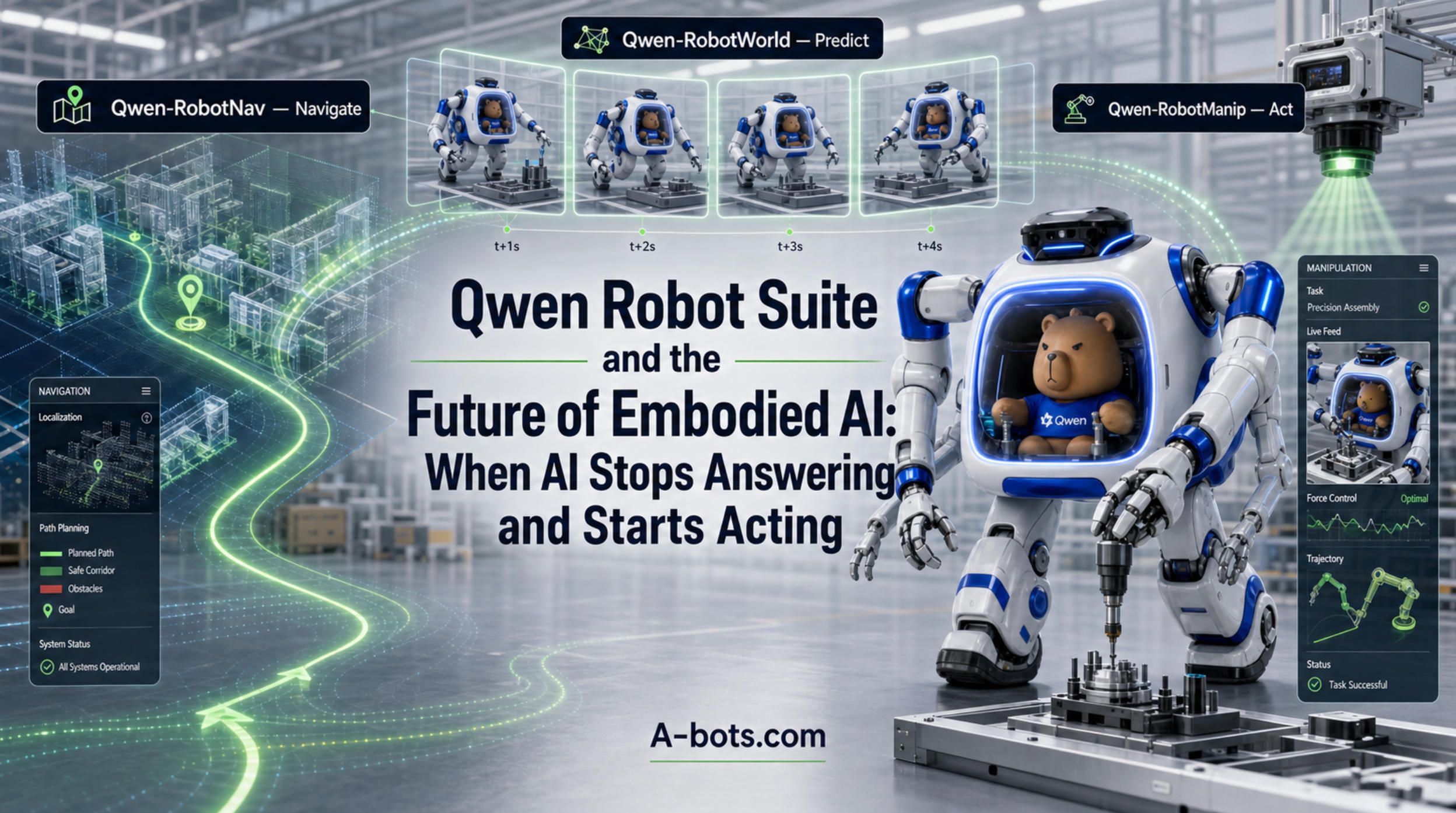
That distinction matters. Qwen Robot Suite is better understood as a proposed foundation layer for many kinds of machines than as the brain of one humanoid robot. Qwen-RobotNav targets navigation across several task families. Qwen-RobotWorld provides a learned model of possible physical futures. Qwen-RobotManip addresses manipulation across different arms, grippers, and control conventions. Together, they suggest that the next important AI platform may not be a single all-knowing model. It may be a coordinated system that can observe, imagine, move, and recover.
Alibaba has already put Qwen Robot Suite into pilot testing with selected Alibaba Cloud enterprise customers, but neither the customers nor production success metrics have been disclosed. That makes the launch more substantial than a laboratory teaser, yet still far from proof of reliable large-scale deployment. (South China Morning Post) The useful question is therefore not whether Qwen-RobotNav, Qwen-RobotWorld, and Qwen-RobotManip can produce impressive demonstrations. It is whether this architecture can survive warehouses, factories, hospitals, and service environments where one rare error can outweigh thousands of successful actions.
Why three models are more interesting than one robot demo
The central idea behind Qwen Robot Suite is functional separation. Navigation, prediction, and manipulation overlap, but they do not operate on identical time horizons or require identical data. Qwen-RobotNav may need to remember a long route, select useful camera views, and react to moving obstacles. Qwen-RobotWorld must generate plausible consequences before the robot commits to an action. Qwen-RobotManip needs precise, low-level motion generation and rapid correction when contact does not unfold as expected.
That modularity is the defining bet of Qwen Robot Suite.
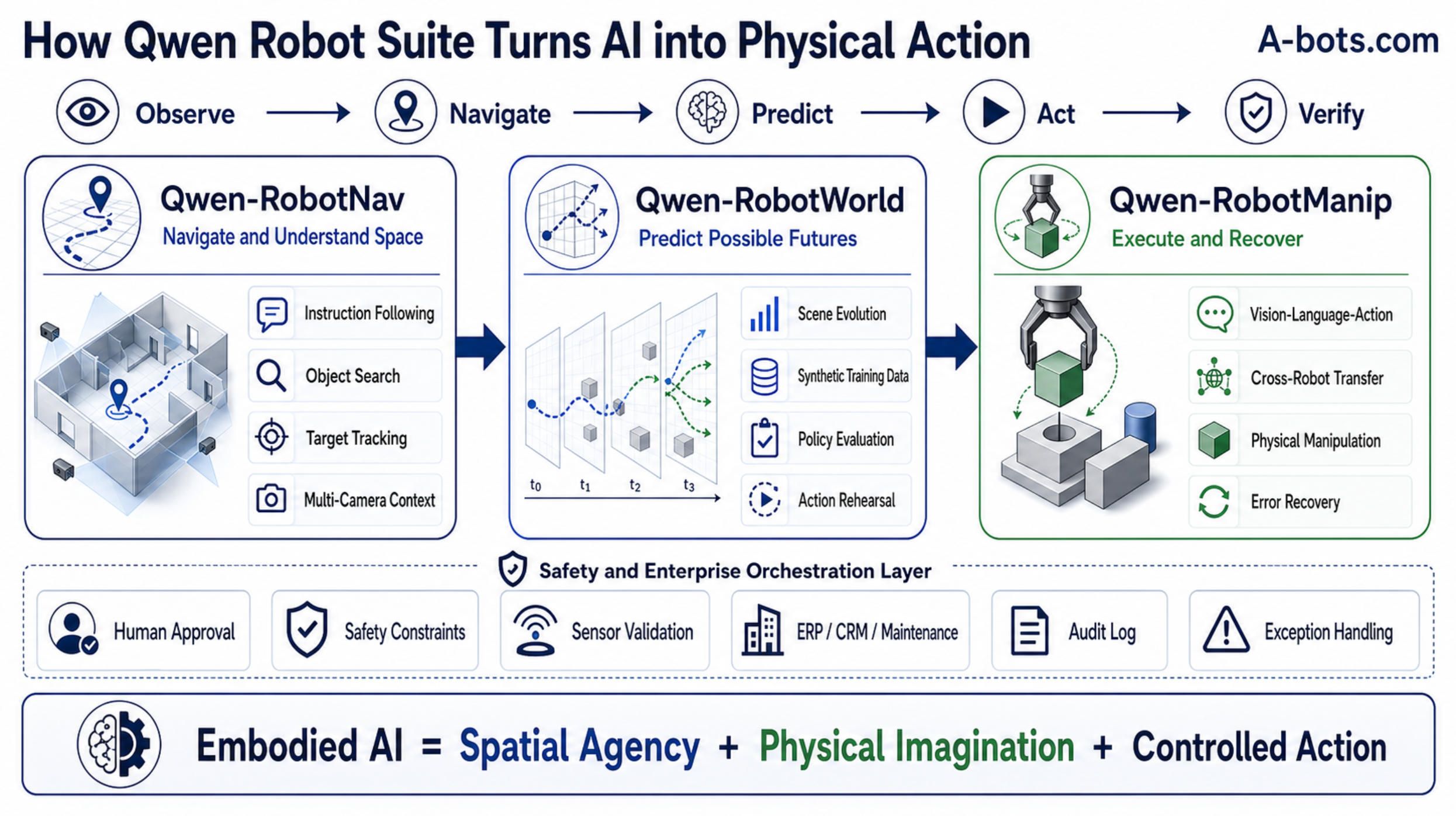
This separation creates a possible hierarchy. An enterprise application can define the goal and constraints. Qwen-RobotNav can bring the machine to the relevant location. Qwen-RobotWorld can evaluate likely scene evolution or supply synthetic experience. Qwen-RobotManip can execute the physical task. A monitoring layer can stop, approve, or re-plan the workflow. Qwen Robot Suite therefore resembles an operating stack for embodied agents more than a conventional robot control package.
The architecture also avoids a seductive but dangerous assumption: that one giant model should directly control every motor from every instruction. A general model is valuable for transferring knowledge, but physical systems still benefit from modular verification. If Qwen-RobotNav proposes an unsafe path, a motion planner can reject it. If Qwen-RobotWorld produces an uncertain forecast, the system can request another view. If Qwen-RobotManip encounters unexpected resistance, a force limit and a recovery policy can override the learned action. Qwen Robot Suite will become commercially important only if these boundaries are engineered as carefully as the models themselves.
Qwen-RobotNav: navigation as configurable agency
Qwen-RobotNav is not described as a simple visual autopilot. Its technical report presents a navigation foundation model with externally configurable task modes and observation parameters. In practical terms, an upper-level agent can ask Qwen-RobotNav to behave differently for instruction following, object search, target tracking, or autonomous driving without rebuilding the backbone for every task.
This is one of the most consequential ideas in Qwen Robot Suite. A robot looking for a specific pallet should allocate visual attention differently from a robot following a person. A delivery platform navigating a corridor does not need to retain video history in the same way as a vehicle reasoning about several cameras and traffic participants. Qwen-RobotNav lets an agent adjust token budget, camera weighting, and context strategy at inference time. The model was trained with randomized configurations so that Qwen-RobotNav can accept those changes without architectural modification.
In this sense, Qwen Robot Suite treats attention itself as an operational resource.
Alibaba reports that Qwen-RobotNav was trained on 15.6 million samples and scales from 2 billion to 8 billion parameters. The training combines trajectory data with vision-language data because trajectory-only learning can collapse into reactive action prediction: the machine imitates the next movement but loses broader semantic reasoning. Qwen-RobotNav is intended to preserve a spatial-planning substrate shared across navigation tasks. The report claims state-of-the-art results on major benchmarks and zero-shot transfer to real robots, although independent replication will be essential.
The most forward-looking part is the agentic loop. A planner can decompose a long job, call Qwen-RobotNav repeatedly, switch task mode during execution, and alter how much visual history the model consumes. In a future warehouse, Qwen-RobotNav might first follow a map, then search for a mislabeled container, and finally track a forklift before approaching a workstation. Qwen Robot Suite turns navigation from a fixed skill into a service that a higher-level application can configure.

Qwen-RobotWorld: a machine that rehearses the future
Qwen-RobotWorld is conceptually the boldest component. It is a language-conditioned video world model: given an observation and an action expressed through language, Qwen-RobotWorld predicts a future visual trajectory. Its scope includes robot manipulation, indoor navigation, autonomous driving, and transfer from human activity to robot behavior.
The training scale helps explain the ambition. Qwen-RobotWorld uses an Embodied World Knowledge corpus containing 8.6 million video-text examples, more than 200 million frames, over 20 embodiments, and more than 500 action categories. Its architecture combines frozen Qwen2.5-VL semantic representations with video latents in a 60-layer double-stream diffusion transformer. Qwen-RobotWorld is therefore not a classical physics simulator calculating exact forces from explicit equations. It is a learned generator of plausible physical futures.
That difference is both the opportunity and the risk. Qwen-RobotWorld can cheaply generate synthetic data, create scalable virtual evaluation scenarios, and provide planning signals. If a robot has little experience with a rare arrangement of objects, Qwen-RobotWorld may produce additional trajectories for training. If a policy must be tested against many possible disturbances, Qwen-RobotWorld may generate alternative outcomes faster than collecting them in a physical lab.
The report says the model ranks first overall on EWMBench and DreamGen Bench and leads open-source systems on WorldModelBench and PBench. These are meaningful results, but they still measure performance inside defined evaluation systems rather than operational reliability inside an uncontrolled facility.
Visual plausibility is not physical truth. Qwen-RobotWorld can generate a future that looks convincing while violating friction, mass, contact geometry, or hidden mechanical constraints. A cup may appear stable although its center of gravity is wrong; a gripper may seem to close around an object without applying usable force.
Qwen Robot Suite therefore cannot treat Qwen-RobotWorld as an oracle. The safest near-term role is proposal and rehearsal: Qwen-RobotWorld narrows the search space, while sensors, deterministic constraints, and real-world tests decide what is safe.
This limitation will shape the first dependable Qwen Robot Suite deployments.
Qwen-RobotManip: scaling action by aligning incompatible data
Qwen-RobotManip addresses the hardest final meter: touching and changing the world. Robot manipulation data is scarce, expensive, and fragmented. A trajectory collected from one arm may use different coordinates, timing, cameras, grippers, and control frequencies from another. Simply mixing those records can confuse a model instead of improving it.
The main contribution of Qwen-RobotManip is an alignment framework across representation, motion, and behavior. The aim is to make demonstrations from different sources express compatible meaning before training at scale. Qwen-RobotManip also uses a human-to-robot synthesis pipeline that converts egocentric hand demonstrations into robot trajectories across 15 platforms.
According to the report, the resulting pretraining corpus covers approximately 38,100 hours and uses open-source datasets and human video rather than proprietary robot collection. (arxiv.org) This is an important strategic choice: Alibaba is attempting to increase physical experience without requiring every useful movement to be recorded separately on expensive robotic hardware.
The claimed capabilities are exactly what real deployment needs: zero-shot instruction following, robustness to perturbation, reactive error recovery, and transfer between robot embodiments. Qwen-RobotManip was tested on AgileX ALOHA, Franka, UR, and ARX hardware. In the authors’ out-of-distribution evaluations, Qwen-RobotManip outperformed prior systems including Physical Intelligence’s π0.5 and ranked first in RoboChallenge with a reported 20% relative improvement. (arxiv.org)
These results are promising but should not be mistaken for a universal household robot. Benchmark success measures defined task distributions; it does not certify years of unattended operation, safe contact with people, or competence with every deformable, transparent, slippery, or fragile object. Qwen-RobotManip may generalize better than earlier policies while still failing on the long tail. The important achievement is that Qwen-RobotManip makes heterogeneous data usable at a scale that begins to resemble foundation-model training.
For Qwen Robot Suite, the long tail is the real commercial test.
Within Qwen Robot Suite, Qwen-RobotManip is the component most directly exposed to liability. A wrong sentence is inconvenient; a wrong motion can damage a product, stop a production line, or injure a person. Commercial implementations will need speed and force limits, collision checking, confidence thresholds, protected zones, human approval, and full action logs around Qwen-RobotManip. Intelligence does not remove classical safety engineering. It increases the number of situations safety engineering must cover.
The closest analogue is a stack, not a single competitor
No competitor maps perfectly onto Qwen Robot Suite. Physical Intelligence’s π0.7 and Figure’s Helix 02 are strong comparisons for generalist action, while Google DeepMind’s Gemini Robotics family emphasizes embodied reasoning and adaptable robot control. However, the closest strategic analogue is NVIDIA’s physical AI stack: Cosmos world foundation models for generating and reasoning about possible worlds, Isaac GR00T for robot policies, and Isaac/Omniverse infrastructure for simulation, training, and deployment. (physicalintelligence.company)
This comparison places Qwen Robot Suite in a platform race, not merely a model race.
The parallel is revealing. Qwen-RobotWorld occupies territory similar to NVIDIA Cosmos, while Qwen-RobotManip overlaps with Isaac GR00T. Qwen-RobotNav gives Qwen Robot Suite a broad, explicitly configurable navigation layer. NVIDIA’s advantage is a mature surrounding ecosystem of GPUs, simulation, edge computers, data pipelines, and industrial partnerships. Alibaba’s potential advantage is the integration of Qwen-RobotNav, Qwen-RobotWorld, and Qwen-RobotManip with a fast-moving multimodal model family and Alibaba Cloud’s enterprise reach.
Google offers a different blueprint. Gemini Robotics-ER 1.6 focuses on spatial, multi-view, and physical reasoning, while Gemini Robotics On-Device brings a vision-language-action policy onto local hardware. That is important because cloud-only control is unsuitable for many safety-critical loops. (deepmind.google)
Figure’s Helix 02 goes further in hardware specificity, controlling a humanoid’s walking, manipulation, and balance as one continuous full-body system. Physical Intelligence’s π0.7, meanwhile, represents a highly capable general-purpose policy with steerable behavior and emergent skills. These projects are not merely alternative models. They represent competing answers to a structural question: should physical intelligence be modular and hardware-independent, or deeply integrated with one robot body?
Qwen Robot Suite is broader in declared decomposition, but breadth is not the same as product readiness. Qwen-RobotNav, Qwen-RobotWorld, and Qwen-RobotManip were reported largely through their creators’ benchmarks and technical evaluations. NVIDIA, Google, Physical Intelligence, and Figure also publish selective evidence. The decisive competition will be measured in task completion per hour, intervention rate, recovery time, damage rate, and cost per successful job—not in a single leaderboard score.
The missing layer is enterprise software
Even if Qwen Robot Suite works perfectly at model level, a business cannot assign work by sending an isolated natural-language prompt to a robot. Physical operations depend on identity, permissions, inventory, asset history, work orders, customer commitments, and exception policies. Qwen-RobotNav needs to know where the robot is allowed to travel. Qwen-RobotWorld needs the correct scene and operational constraints. Qwen-RobotManip needs task-specific tolerances and an authoritative definition of completion.
This is where custom mobile and enterprise applications become part of embodied intelligence rather than an administrative afterthought. A field service app might identify the asset, retrieve maintenance history, validate the technician’s authority, and pass a bounded inspection task to Qwen Robot Suite. Qwen-RobotNav could position a mobile platform, Qwen-RobotWorld could evaluate alternative actions, and Qwen-RobotManip could operate a tool. The application would capture evidence, request approval when uncertainty is high, and synchronize the result with ERP, CRM, or maintenance systems.
For companies exploring this transition, A-bots.com can contribute at the orchestration layer: mobile interfaces, offline workflows, backend integration, role-based control, telemetry, and human-in-the-loop approval. The value is not in placing a branded screen in front of Qwen-RobotManip. It is in creating a controlled workflow around Qwen-RobotNav, Qwen-RobotWorld, and Qwen-RobotManip so that model output becomes an auditable business action. Qwen Robot Suite supplies potential physical capabilities; application engineering determines whether those capabilities produce reliable operational value.
What could happen over the next three years
The first commercial effect of Qwen Robot Suite is unlikely to be a universal humanoid entering every home. Structured environments offer a much easier economic path. Warehouses, factories, laboratories, retail backrooms, and infrastructure inspection already contain repeated tasks, mapped zones, and measurable outcomes. Qwen-RobotNav can improve flexible movement, Qwen-RobotWorld can expand training and testing scenarios, and Qwen-RobotManip can reduce the amount of task-specific policy engineering.
The second effect may be a change in robot procurement. Companies currently buy machines as fixed-capability assets. If Qwen Robot Suite and rival stacks mature, buyers may evaluate hardware as an embodiment that can receive new skills. Qwen-RobotManip could make policy portability more practical; Qwen-RobotNav could support multiple navigation roles; Qwen-RobotWorld could shorten validation before a skill reaches the floor. The robot would become closer to a software-defined worker, although mechanical limits would remain decisive.
The third effect may be a new data economy. Robot fleets generate valuable failure traces, recovery episodes, and edge cases. Qwen-RobotManip improves when action data becomes more diverse and aligned. Qwen-RobotNav benefits from varied environments and navigation behaviors. Qwen-RobotWorld needs examples where the world evolves in difficult or surprising ways.
Enterprises may begin treating embodied data as a strategic asset. That will introduce governance questions resembling those around customer data but carrying additional safety and labor implications: who owns a robot’s operational experience, whether it may be used to train shared models, and how failures involving people or property should be recorded.
The strongest systems will probably be hybrid. Qwen Robot Suite can supply general perception, planning, and action priors. Classical controllers can guarantee fast local responses. Digital twins and Qwen-RobotWorld can explore scenarios. Qwen-RobotNav can manage semantic navigation while conventional localization provides geometric certainty. Qwen-RobotManip can propose motions while certified limits constrain execution. Human operators can handle novel exceptions and authorize high-consequence actions.
That hybrid future is a realistic path for Qwen Robot Suite.
A real transition, with an unfinished reliability story
Alibaba’s launch is significant because it frames embodied AI as a coordinated foundation-model problem. Qwen Robot Suite is not simply Qwen attached to motors. Qwen-RobotNav introduces configurable navigation for agentic systems. Qwen-RobotWorld gives machines a learned mechanism for rehearsing possible futures. Qwen-RobotManip attempts to turn incompatible human and robot experience into transferable physical skill.
The suite also exposes how far the industry still has to go. Qwen-RobotWorld predicts pixels, not guaranteed physics. Qwen-RobotNav must remain dependable under changing viewpoints, occlusion, and long missions. Qwen-RobotManip must cope with contact, wear, latency, and objects that do not behave like training examples. Qwen Robot Suite still needs independent evaluation, production economics, edge-deployment details, and transparent safety cases.
Yet the direction is difficult to dismiss. Chatbots made intelligence accessible through language. Qwen Robot Suite and its competitors are trying to make language a control surface for the physical world. If Qwen-RobotNav can reliably reach the right place, Qwen-RobotWorld can forecast useful consequences, and Qwen-RobotManip can act with recoverable precision, the result will be more than a smarter robot.
It will be a new software platform—one whose outputs have weight, momentum, and consequences.
✅ Hashtags
#QwenRobotSuite
#QwenRobotManip
#QwenRobotWorld
#QwenRobotNav
#EmbodiedAI
#PhysicalAI
#Robotics
#EnterpriseAI
Other articles
Precision Livestock Farming: Halter & CowManager Review Technical review of two precision livestock farming systems built on opposite design choices. Halter is a solar GPS collar that not only tracks cattle but steers them with directional audio, vibration, and a last-resort pulse, using satellite and LoRaWAN links and filtered GPS. CowManager is an ear sensor that fuses ear temperature with accelerometer behavior classification to flag illness, heat, and transition risk days early. The review weighs how each senses, decides, transmits, and acts, with real limits. The second half goes deeper into sensing modalities, rumen boluses, machine-learning trade-offs, and connectivity, then shows where A-Bots.com builds custom apps, firmware, and QA testing.
FMIS Review: John Deere Operations Center & Agworld Review of two farm management platforms built on opposite philosophies. John Deere Operations Center is a telematics-anchored hub: JDLink machine data, Work Planner, a REST and OAuth2 API across 150-plus partners, and dealer remote support, with the trade-offs of a single-vendor ecosystem. Agworld is a collaboration platform built on a shared, farmer-owned dataset, with standout offline-first mobile apps and integrated agronomy and financials. The review weighs how each ingests, stores, and shares data. The second half goes deep into the interoperability stack that decides whether data can move: ISOBUS, ISOXML, and AgGateway ADAPT, plus where A-Bots.com builds custom FMIS and QA testing.
Custom Agritech Development & QA Testing: Build vs Buy The capstone of a four-part agritech series. Across reviews of FieldView, CropX, Halter, CowManager, John Deere Operations Center, and Agworld, the same walls kept appearing: vendor lock-in, per-unit pricing that punishes scale, weak offline behavior, the integration tax of ISOBUS and ADAPT, and data nobody fully owns. This article turns those gaps into a build-versus-buy framework by operation scale, then shows the full stack A-Bots.com builds — device firmware, offline-first apps, interoperability layers, owned analytics — and the independent QA testing that hardens existing platforms. Custom agritech development, whole project or single module, plus testing of what you already run.
Custom Field Service App Development for HVAC, Equipment Repair, and Maintenance Companies Field service companies often do not lose money because they lack software. They lose it between disconnected systems: customer requests, dispatch, technician execution, parts availability, asset history, service proof, and back-office workflows. This article explains when off-the-shelf field service management software stops fitting HVAC, equipment repair, and maintenance companies, and why a custom mobile app can become the operational layer that connects the field with ERP, CRM, inventory, accounting, and customer communication. It also explores offline-first technician workflows, dispatcher visibility, parts logic, AI-assisted service operations, and the build-vs-buy decision.
Field Service ERP Apps: Mobile Workflows for Technicians Field service companies often lose profit not during the repair itself, but between disconnected steps: dispatch, parts availability, technician notes, customer approval, invoicing, and ERP updates. This article explains how a field service ERP app becomes the mobile operational layer between office systems and real-world service execution. It explores how custom apps connect technicians, dispatchers, customers, inventory, service history, proof of work, and billing into one controlled workflow. For HVAC, equipment repair, industrial maintenance, and after-sales service teams, the goal is not more software, but better service profitability control.
Top stories
Copyright © Alpha Systems LTD All rights reserved.
Made with ❤️ by A-BOTS