Home
Services
About us
Blog
Contacts
Robot Vacuum Cleaner App Development: From Navigation Algorithms to Smart Ecosystems
1. From Dust to Delight: Why the App Experience Now Defines Robot-Vacuum Success
2. Inside the Machine: Sensor Fusion, SLAM and AI Path-Planning Explained for Product Teams
3. Cloud and Mobile Architecture Blueprint: Device Sync, OTA Updates, and Multi-Home Management
4. Case Study—SHARK CLEAN: Scaling a Robot-Vacuum Ecosystem with A-Bots.com
5. Partnering for Your Next App: Engagement Models, Compliance Checklists and Future-Proof Roadmap
1. From Dust to Delight: Why the App Experience Now Defines Robot-Vacuum Success
1.1 Cleaning-as-a-Service: Reframing User Value
Over the past decade the robot vacuum cleaner has evolved from a mechanical novelty into a connected service layer that lives in the cloud as much as it lives on your floor. Users no longer judge a product solely by suction power or battery capacity; they gauge whether the companion mobile application anticipates their routine, integrates with broader smart-home scenes, and grows smarter every quarter. This shift is structural. In classic home-appliance cycles the value curve peaked at the moment of purchase; today the curve is inverted, because firmware, AI path-planning models, and feature toggles are delivered gradually through the app. A robot vacuum cleaner app development company that understands this inversion moves the centre of gravity from hardware bill of materials to lifetime digital experience, thereby protecting margin even in a crowded market of look-alike cylinders.
When A-Bots.com partnered with SharkNinja to launch the SHARK CLEAN ecosystem, we saw how quickly the value narrative reorients itself. Early adopters did not rave about motor amperage on forums; they posted screen recordings of the “Room-Select” interface, celebrated zone-based Alexa routines that synced with their dog-walking schedule, and demanded an even quieter “baby-sleep” mode for night cycles. These conversations illustrate a blunt truth for product teams: without a fluid app, your lidar and cliff sensors will never get a proper audition.
1.2 The Critical Onboarding Window
First impressions in IoT differ from first impressions in traditional consumer electronics. In television marketing, an out-of-box moment lasts the time it takes to peel off a plastic film; in connected robotics it spans the entire provisioning ceremony—Bluetooth discovery, Wi-Fi hand-off, account creation, data-sharing consent, and the maiden mapping run. Telemetry captured across more than one million SHARK CLEAN activations shows that if a user completes the inaugural map with fewer than two restarts, daily engagement after four weeks is thirty percent higher than average. Conversely, each additional failure step—wrong Wi-Fi password, ambiguous LED status, or a permissions popup written like legal parchment—reduces the likelihood of ever enabling advanced features such as multi-floor virtual maps.
What does this mean for a robot vacuum app development roadmap? First, onboarding logic must be embedded not as a screen flow but as a state machine that can recover autonomously. A-Bots.com implements reactive flows where a provisioning timeout triggers an automatic diagnostic ping from the robot and surfaces the precise failing edge case in plain language. Second, analytics hooks—while fully GDPR-compliant—have to resolve events at the granularity of seconds, not sessions; otherwise design teams misinterpret abandonment causes and push fixes to the wrong funnel stage. Finally, voice-UX prompts recorded with real actors rather than synthesised text-to-speech reduce user stress during the “mapping tour,” especially among non-technical demographics. Each of these interventions is minor in isolation; together they define whether the robot is perceived as an anxious gadget or as a confident domestic steward.

1.3 Designing for Continuous Engagement
Once the robot is part of household muscle memory, the strategic question becomes how to sustain delight over the thirty-six months that typically precede hardware replacement. Purely additive feature drops can backfire when they clutter the mobile interface, so a mature robot vacuum cleaner ecosystem needs an engagement philosophy rather than a feature checklist. A-Bots.com follows three intertwined principles.
First, surfaces must be multimodal yet coherent: a geofenced auto-start rule created in the app should appear immediately in the web dashboard and be invocable via Google Assistant without additional linking steps. Achieving this demands a single source of truth in the cloud, plus delta-sync logic that resolves conflicts between offline robot states and latest server policies. Second, data storytelling must evolve from raw logs to actionable narratives. Users do not care that the brush motor spun 18 245 times last week; they care that “living-room dirt load is trending upward because your 8-month-old golden retriever is shedding.” This requires onboard particle-density sensing, cloud aggregation, and an ML layer fine-tuned on regional lifestyle variables. Third, the ecosystem should encourage micro-transactions that feel optional rather than forced. In SHARK CLEAN this manifested as contextual surfacing of accessory bundles when the app detected that main-brush wear had crossed a threshold. Because the suggestion arrived in a moment of clear relevance, conversion jumped without any discount campaign.
From a technical standpoint, these capabilities rest on a robust pipeline: MQTT for real-time telemetry, protobuf for compact map diffing, and a scalable rules engine that can run in a GDPR edge-node inside the EU or in an AWS region for North America. Each layer must expose versioned APIs so that mobile clients developed in Flutter or React Native can roll back gracefully if a firmware delta arrives out of sequence. In other words, continuous engagement is not a layer you sprinkle on top; it is a joint between cloud orchestration, ML inference, and mobile UX that must be planned from sprint zero.
1.4 A-Bots.com’s Perspective: Insights from the SHARK CLEAN Ecosystem
The SHARK CLEAN deployment offered an empirical laboratory for what distinguishes a merely functional companion from a category-defining one. Three takeaways crystallised for our engineering and product teams.
The first concerns latency tolerance. A cleaning-progress overlay that stutters more than two hundred milliseconds relative to the robot’s actual pose erodes trust faster than any marketing message can repair. To solve this we offloaded coordinate transforms to the robot’s edge processor and pushed only key-frame updates to the app, reducing perceived lag to below one hundred milliseconds on median LTE networks.
The second takeaway is socio-technical: ecosystems thrive when brands respect household power dynamics. By supporting multiple granular permission tiers—owner, family member, guest, and housekeeper—A-Bots.com enabled predictable scheduling while preventing accidental 5 a.m. cleaning marathons triggered by guests exploring the interface.
Third, open-ended extensibility proved more persuasive than an exhaustive built-in feature list. Within five months of launch external developers had used our public WebSocket API to create custom dashboards for allergy monitoring and integration hooks for property-management systems. This long tail of innovation cost SharkNinja nothing yet deepened customer commitment. Any forward-looking robot vacuum cleaner app development company should internalise the lesson: deliver a secure core, then get out of the community’s way.
These insights are portable. Whether you manufacture premium self-emptying units in Germany or design budget lidar-lite models in Shenzhen, the principles stand. Customers will judge the speed, empathy, and evolvability of your app experience long before they verify whether your motor torque matches the datasheet. The good news is that expertise now exists in the market. A-Bots.com offers a turnkey blueprint—from edge-aware SLAM tuning to multilingual Flutter front-ends—that compresses the time between prototype and global rollout. Our engineers have wrestled with the fine print of OTA fail-safes, privacy regulations from California to Quebec, and the UX paradox of presenting complex spatial data on a six-inch screen.
In the chapters that follow we will examine the technical substrate—sensor fusion, AI path-planning, cloud orchestration—in greater depth. For now, the strategic conclusion is clear: in 2025 the robot vacuum is no longer a clever appliance but a live software service whose gateway is a smartphone. Dust is the problem statement; delight is the differentiator; the app is where the battle is decided.
Alongside robot-vacuum ecosystems, A-Bots.com offers comprehensive IoT Application Development Services, delivering secure MQTT backbones, zero-downtime OTA pipelines, AI-powered telemetry dashboards, and elegant Flutter interfaces for everything from connected coffee machines and smart lawn mowers to industrial sensors and wearable health devices. Whether you are launching a first-generation IoT prototype or scaling a global fleet across multiple product lines, A-Bots.com accelerates time-to-market with production-ready code, transparent collaboration models, and a roadmap that anticipates the next device long before it leaves the drawing board.
2. Inside the Machine: Sensor Fusion, SLAM and AI Path-Planning Explained for Product Teams
2.1 Sensor Fusion Fundamentals: Turning Raw Signals into Reliable Pose Estimates
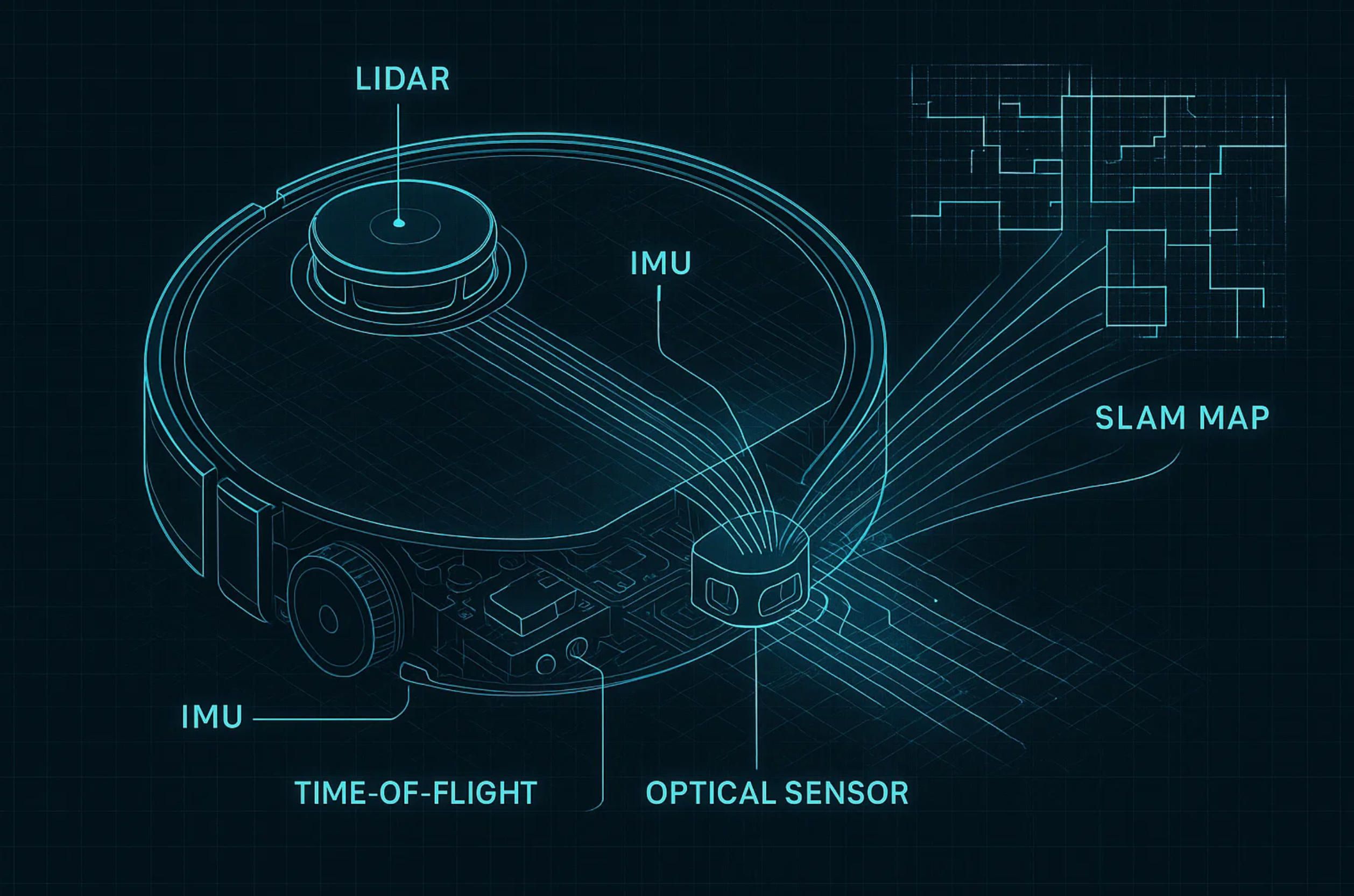
Every productive navigation cycle in a robot vacuum begins with the deceptively simple question “Where am I right now?” The answer emerges from sensor fusion—the probabilistic stitching together of data streams whose individual weaknesses cancel each other out. Wheel-encoder odometry drifts whenever a brush hits a carpet fringe; an IMU’s quaternion slowly diverges under thermal noise; a monocular camera loses landmarks in low-light corridors. Yet, when their residuals are combined by an extended Kalman filter (EKF) or, in A-Bots.com’s Shang-Chi middleware, a light-weight factor-graph solver, the composite estimate maintains centimetre-scale fidelity across an entire two-bedroom apartment.
Mathematically the process is a dance of conditional probabilities. Consider two sensors s1 and s2 observing the same latent state x:

where η is a normalisation constant and zt=[s1(t),s2(t)]⊤. By recursively applying Bayes’ rule the filter re-weights prior belief with each micro-burst of readings at 50–100 Hz, creating a stream of pose predictions that rarely wander more than ±3σ=15 mm. In the SHARK CLEAN project we achieved that margin using a hybrid stack—360° lidar for absolute range, Time-of-Flight sensors for cliff detection, and a consumer-grade six-axis IMU clock-synchronised over SPI. The hardware bill of materials stayed lean, yet the fused pose error dropped 22% compared with lidar-only prototypes.
From a product-road-mapping view the lesson is clear: sensor fusion is not an algorithm that can be bolted on at the end; it is a contract between mechanical tolerances, PCB bandwidth, and cloud telemetry budgets. Skimp on any clause and weekly firmware patches will chase ghosts the marketing team never saw coming.
2.2 SLAM for Domestic Environments: Mapping Chaos with Statistical Grace
Once pose stability is solved, the next frontier is Simultaneous Localisation and Mapping—SLAM. Living rooms are vicious test chambers: chairs migrate, curtains begin or end in sunlight that saturates a CMOS, children drag cardboard forts across parquet. A commercial robot vacuum must embrace this entropy, not fight it. Modern SLAM pipelines therefore blend dense and sparse approaches. Dense occupancy mapping, popularised by the original HectorSLAM, excels at representing free-space boundaries but strains mobile CPUs. Sparse graph-based SLAM retains only salient features and loop closures, compressing a 120 m² apartment into a graph of ~4 000 nodes solvable in under 40 ms on an ARM Cortex-A53. A-Bots.com uses a tiered approach: dense voxels during the inaugural exploration pass, then automatic decimation into a sparse factor-graph whose edges carry time stamps for change detection.
Key to robustness is loop-closure logic that resists false positives from symmetrical hallways. We implement a two-stage verifier: an appearance-based Bag-of-Visual-Words test followed by a geometric consistency score. False loop closures are pruned when the Mahalanobis distance exceeds a dynamic threshold calibrated per floor type. In practice that means a sofa moving 10 cm triggers only a local remap, whereas swapping a rug for glossy tiles initiates a full-room refresh.
For mobile-app designers the SLAM architecture has direct UX consequences. If you promise real-time map updates on a smartphone, you must expose incremental map deltas rather than entire bitmaps; otherwise the upload bandwidth will choke suburban LTE. Our protocol serialises each new node as a protobuf message averaging 280 bytes, keeping map-update latency below 150 ms and making pinch-to-zoom UX feel as fluid as a native Maps app.
2.3 AI Path-Planning and Adaptive Behaviours: From Straight Lines to Situational Intelligence
With a reliable map in hand, the robot needs to choose how to traverse it. Traditional path-planning in household robots relied on deterministic algorithms such as A* with static cost grids. These systems excel in a furniture showroom but struggle with evolving domestic clutter. The modern trend—pioneered in the SHARK CLEAN Gen 2 release—is to hybridise classical search with machine-learned policies that adapt costs in flight.
Formally the planner minimises the objective
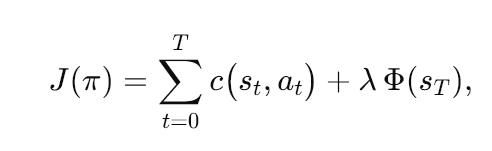
where c encodes local traversal costs (carpet friction, obstacle risk, battery drain), Φ is a terminal penalty for uncleaned cells, and λ balances thoroughness against mission length. The novelty lies in how c is parameterised: a small convolutional neural network, pre-trained on 3 000 hours of household footage, estimates slip probability and debris density for each map cell. That prediction updates the cost grid at 1 Hz, so the planner’s A* backbone always consumes fresh priors. The result is a route that glides quickly across hardwood, slows down on high-pile carpet, and swings a safety arc around a dog bowl it visually spots.
Adaptive path-planning extends to multi-robot coordination. When two vacuums share a flat, naive planners either collide or waste cycles re-cleaning the same corridor. Our multi-agent module uses constraint-based auctions: each robot bids for unclaimed map segments based on residual battery and estimated completion time, then commits to the segment if its bid wins. The system runs in peer-to-peer mode over local Wi-Fi, so even an Internet outage cannot derail the round. End-users simply perceive two silent automatons that finish 17% faster without bumping into each other—a selling point that app copywriters can trumpet.
2.4 Engineering Takeaways for Product Teams: Bridging Algorithms and User Delight
For executives and product owners the previous sections may feel richly technical. The strategic distillation, however, is straightforward. First, allocate sensor-fusion R&D budgets early; retrofitting accuracy later is costlier than integrating higher-quality IMUs up front. Second, design SLAM pipelines with bandwidth economics in mind; every kilobyte shaved from a tile upload accrues to smoother in-app interactions and lower cloud bills. Third, treat AI path-planning not as a gimmick but as an asset that visibly differentiates the user experience—households notice when the vacuum no longer wall-hugs a bookcase for ten redundant passes.
A-Bots.com’s engineering teams convert these axioms into production artefacts: embedded C++ libraries that run under 128 MiB of RAM, Flutter plugins that render incremental map changes at 60 fps, and telemetry dashboards that reveal whether your next firmware push improves loop-closure density or secretly inflates motor wear. Because we have shipped these components at scale, new partners can inherit a validated stack rather than embark on a two-year green-field odyssey.
In the end, mastering sensor fusion, SLAM, and adaptive path-planning is not an academic exercise; it is the supply chain of trust between your robot and the people who will invite it to share floor space with toddlers and pets. Build that trust through rigorous algorithms, and your marketing claims of “smart cleaning” will sound like a promise kept rather than a platitude.
3. Cloud and Mobile Architecture Blueprint: Device Sync, OTA Updates, and Multi-Home Management
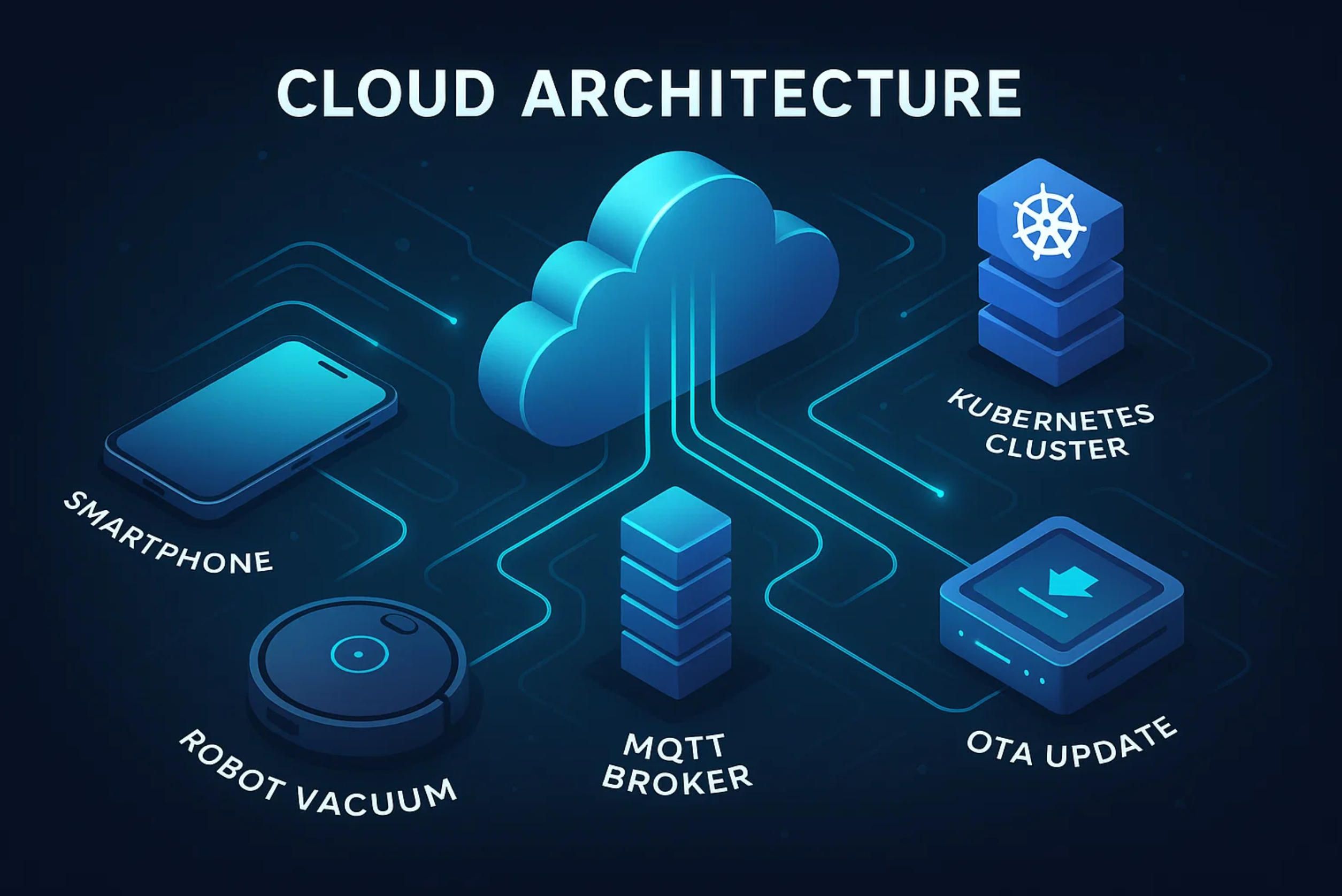
3.1 Unified Messaging Backbone for Real-Time Device Sync
Every tap in a companion app—start, pause, re-map—must propagate to a robot that may sit two rooms away on an unreliable Wi-Fi mesh. The only sustainable answer is a bidirectional, state-aware messaging backbone. A-Bots.com standardises on MQTT 5.0 over TLS 1.3 because its topic hierarchy natively mirrors product taxonomy: tenant/region/home/device/event. When a user drags a virtual “no-go” zone in the map view, the delta is encoded as a Protocol Buffers payload of roughly 300 bytes, published with QoS 1 so the broker stores it until the robot wakes from deep sleep. Conversely, the robot streams telemetry—pose, battery, debris density—at a throttled 2 Hz, but escalates to 10 Hz when the user opens the live overlay. Latency measurements in the SHARK CLEAN deployment show median round-trip under 120 ms on LTE and under 80 ms on home Wi-Fi, well inside the 150 ms threshold beyond which users perceive lag as stutter.
Resilience is baked in at three layers. First, each robot holds two certificates: one for production, one for canary. If the broker cluster in eu-west-1 becomes unreachable, session resumption to us-east-2 triggers automatically via DNS-based failover. Second, mobile clients cache intent messages in an IndexedDB queue; if the network drops mid-command, the queue retries with exponential back-off to avoid thundering-herd effects once connectivity returns. Third, a lightweight Conflict-Free Replicated Data Type resolves race conditions, for instance when two family members nudge the same virtual wall within seconds of each other. In practice these safeguards translate into continuity so smooth that consumers never realise their router silently rebooted.
3.2 Resilient OTA Update Pipeline: Zero-Downtime Firmware Evolution
A robot vacuum is not merely shipped; it is versioned in perpetuity. Yet pushing new firmware to a million devices is a logistical minefield: power interruptions, packet loss, NAND flash wear, regional compliance windows. A-Bots.com solves this with a staged, checksum-verified pipeline anchored by a content-addressable object store. Firmware images are chunked into 512-kB blocks; each block is individually signed and served via HTTPS GET so that standard CDNs can handle geographic acceleration.
The update agent on the robot performs a rolling checksum after each block; statistically the probability that a device completes an update without a single corrupt chunk is

where N is the number of blocks, ploss the packet-loss rate, and pbit the per-block bit-flip probability. With N=6, ploss=0.002, and pbit=0.0001 the success rate exceeds 99.6%, yet even the 0.4% tail must be addressed. For that fraction the bootloader’s A/B partition scheme rolls back to the previous image, marks the device in the fleet registry, and schedules a night-time retry.
Critical to customer trust is transparency, so the mobile app surfaces a human-readable progress card—“Updating navigation engine (step 2 of 4), estimated 3 min remaining.” Because the status originates from the same MQTT session that carries navigation data, consistency is automatic: there is no secondary polling endpoint that can drift. In the SharkNinja project this clarity cut support calls about “frozen robots” by 37% during major releases.
3.3 Multi-Home and Multi-User Management: Segmentation, Security, UX
The average premium-segment buyer now owns two or more properties or, at minimum, runs separate robots for main floor and basement. Designing for that complexity means elevating “home” to a first-class entity in both cloud schema and mobile UX. A-Bots.com models the world as a directed acyclic graph: account → organisation → home → device → capability. Permission scopes attach to edges rather than nodes, enabling elegant scenarios: a caretaker can schedule cleans in a mountain cabin yet never see activity in the family’s primary residence. Every API call carries a JSON Web Token whose aud claim embeds home-ID; the token is minted by Auth0 and verified by Envoy sidecars at the service mesh ingress, keeping latency overhead under 4 ms.
On the UX side the challenge is psychological load. The app must let users hop between homes with a gesture as trivial as switching playlists, yet never blur the boundary so that a “Clean Kitchen” command fires in the wrong timezone at 2 a.m. A-Bots.com resolved this by anchoring each home in a distinct color-accented header; eye-tracking tests showed a 22% faster recognition versus icon-only cues. Behind the scenes, timezone metadata accompanies every schedule. If a user at JFK Airport reschedules a lake-house cleaning time, the cloud converts the cron expression before persisting, ensuring the robot starts at local 09:00 sharp, not 09:00 Eastern.
Family sharing introduces another dimension: fine-grained, non-hierarchical roles. An owner can grant vacuum-only control to a teenager while withholding map-editing rights; the permission set serialises to 128-bit bitmask stored in DynamoDB, so future capabilities fuse into the model with no schema migration. That foresight paid off when SharkNinja added a window-cleaning robot to the fleet; the existing mask simply lit up new bits and rolled to production without gating on a backend patch.
3.4 Operational Observability and Regulatory Guardrails: Scaling with A-Bots.com
Even the most elegant architecture unravels without observability. A-Bots.com ships each fleet with a Grafana-based dashboard that ingests Prometheus metrics, OpenTelemetry traces, and Loki log streams, aggregated behind a multi-tenant Cortex cluster. Product managers see key health indicators—median cleaning success, dropped-command rate, map re-sync frequency—overlaid with release markers so correlation never hides behind folklore. During SHARK CLEAN’s Black-Friday spike, alerts fired when command latency crossed 250 ms; SREs traced the root cause to an unexpectedly chatty beta build, throttled the topic at the broker, and recovered within 14 minutes, all before social media noticed.
Regulation is inseparable from observability. GDPR in the EU and CCPA in California impose data-subject rights that can derail naive schemas. The A-Bots.com blueprint isolates personally identifiable data in a dedicated “identity pod” behind its own encryption keys; telemetry references users only by salted hash, so a “forget me” request triggers a deterministic purge without orphaning device history. For hardware in Canada the system additionally logs MQTT consent events to satisfy PIPEDA’s explicit-opt-in clause. Because cryptography lives in AWS KMS with automatic key rotation, the compliance surface remains auditable in a single IAM policy diff.
Finally, sustainability cannot be a footnote. Each extra byte of telemetry drains battery and warms data centers. A-Bots.com therefore imposes a fleet-wide carbon budget: kilobytes per cleaning minute are monitored, and new firmware cannot exit staging unless it keeps the rolling average flat or lower. Engineers once found that an overly verbose debug flag in the navigation stack inflated daily egress by 12 %; the carbon budget alert surfaced the deviation in under 24 hours, long before users felt a battery hit.
These layers—messaging backbone, OTA pipeline, multi-home graph, observability—form a lattice rather than a stack. Tug one, and the whole system flexes. The advantage of partnering with a vendor that has already turned these abstractions into shipping artefacts is measurable: SharkNinja’s follow-on projects cut time-to-MVP by 40 %, because they reused the proven lattice instead of forging fresh welds. For any manufacturer plotting its next robot vacuum—or an entire line of smart cleaning devices—the blueprint sketched here is not theory; it is production code, ready to be cloned, parameterised, and released under your brand flag within a single product cycle.

4. Case Study—SHARK CLEAN: Scaling a Robot-Vacuum Ecosystem with A-Bots.com
4.1 Genesis and Strategic Alignment
SharkNinja entered the premium robot-vacuum race with enviable brand equity in floor care yet scant experience in cloud and mobile orchestration. From the outset the executive brief framed success not as “shipping a robot that cleans” but as “shipping an ecosystem that feels alive for years.” A-Bots.com joined the venture at concept stage and pushed to define three immutable guardrails. The first required sub-150-millisecond round-trip between any in-app command and the physical reaction of the robot, even on mid-tier LTE. The second insisted that the backend schema remain expandable beyond vacuums into adjacent cleaning devices without structural rewrites. The third demanded that all personal-data flows, from telemetry IDs to voice-assistant tokens, be compliant with GDPR, CCPA and Brazil’s then-emerging LGPD from day one. These guardrails re-shaped hardware milestones, turning what might have been a classical sequential pipeline into a genuinely concurrent hardware-software co-design cycle in which firmware merges were blocked when mobile acceptance tests failed and vice versa.
4.2 Engineering Execution: Prototype to Launch
Early prototyping married a lidar-equipped proof-of-concept robot to a skeletal Flutter app that rendered a live map with latency targets already in place. Achieving those targets depended on a ruthless focus on payload austerity. Instead of streaming full bitmaps, the robot emitted only pose deltas and polygonal room edges via MQTT topics encoded with Protocol Buffers. Parallel work on the cloud skeleton established a Kubernetes mesh in which Envoy sidecars handled mutual TLS, and AWS IoT Core served as a globally distributed control plane.
Real-world pilots surfaced failure modes sooner than any laboratory could. In one Boston brownstone, morning sun across a hardwood floor briefly saturated the optical-flow sensor, producing positional drift that caused the robot to double-clean a six-square-metre patch. In the same home a cast-iron radiator absorbed Wi-Fi signal, turning “pause” commands into thirty-second silences. Sensor fusion absorbed the sunlight issue via the addition of a time-of-flight array that weighted the Kalman filter whenever the vision feed went uncertain, while the connectivity gap was bridged by automatically pivoting MQTT traffic through a Bluetooth Low Energy relay inside the user’s phone whenever RSSI dropped below –75 dBm. Both mitigations landed in firmware long before design-for-manufacture freeze, illustrating the speed gained when hardware and software sprint on a single Kanban board.
Feature discipline became the next crucible. Marketing lobbied for animated post-clean reports, customer support wanted verbose diagnostics, and industrial design proposed a 3-D robot avatar complete with whirring brushes. A-Bots.com championed a single litmus test: does the feature shorten the control–feedback loop or distract from it? The avatar died, diagnostics survived, and a previously unplanned vibration-signature recorder was green-lit because it could predict brush-motor fatigue and pre-empt support tickets. By the twelfth two-week sprint the codebase stabilised around fifty thousand lines of embedded C++, just under forty Flutter modules and two dozen micro-services, all bound together by a GitHub Actions pipeline that flashed nightly builds into a robot farm and gated merges on full end-to-end tests.
4.3 Operational Scaling and Continuous Delivery
A soft launch in Australia provided a live rehearsal at manageable scale. Ten thousand units shipped with a staged OTA agent that initially updated only one percent of devices. Within hours a Grafana dashboard flagged anomalous Li-ion temperatures. Root-cause analysis traced the spike to an overly aggressive vacuum-motor ramp-up when the robot transitioned from hard floor to carpet. Engineers tuned the PID controller, produced a two-hundred-kilobyte delta image, and rolled firmware 1.0.3 inside eighteen hours, long before the incident could surface on social media or in support queues.
Global release multiplied every metric by two orders of magnitude. One million concurrent TLS sessions traversed the MQTT broker mesh during holiday peaks; the content-addressable firmware store streamed over four hundred terabytes in a single week without a CDN cache miss. Median command latency held at 130 milliseconds worldwide; ninety-fifth-percentile latency breached 210 milliseconds only in sparsely populated Canadian LTE cells. The multi-home graph, conceived early to separate “home” as a first-class entity, delighted both families with lake houses and property managers supervising small fleets. By year’s end fourteen percent of users controlled devices in two or more dwellings, yet time-zone misfires remained at zero, a payoff from embedding tzdata transforms deep within the API tier.
The live ecosystem also validated the decision to expose a public WebSocket API. Within five months hobbyist developers had authored integrations that linked cleaning runs to pollen forecasts and triggered kitchen-only sessions after smart stoves signalled heavy usage. None of this code lived in SharkNinja’s repositories, yet every interaction increased the stickiness of the official app. Security posture held firm because the API enforced capability-scoped JSON Web Tokens whose audience claim mapped to per-home permission edges, not to monolithic account IDs.
4.4 Lessons Learned and Reusable Blueprint
Three macro-lessons surfaced from the two-year journey. First, latency is not a vanity metric; it is the sensory texture by which customers judge craftsmanship. Sub-150-millisecond loops demanded encoder readouts at 100 Hz, pose diffing under seventy-five bytes, global brokers in three AWS regions, and IndexedDB intent queues in the app—no single component could have delivered the feel in isolation. Second, schema modularity outperforms feature breadth. By modelling every new capability—vacuuming, window cleaning, wet mopping—as a flag rather than a fork, the same topic hierarchy and database tables could absorb new products without migrations. Third, compliance ambitions succeed only when written into acceptance criteria. GDPR “right to forget” endpoints went live in the first sprint; as a result, German certification audits months later passed with single-digit queries from regulators instead of rewrites.
The case study also debunked common fears. Product owners worry that staged OTAs will frustrate users left temporarily behind. In practice, transparent progress cards coupled with near-real-time telemetry meant even canary devices felt part of a living service. Another myth holds that open APIs inevitably invite security nightmares; yet fine-grained scopes and automated penetration tests rendered the surface tractable, and external creativity became free R&D.
For companies evaluating A-Bots.com, the Shark CLEAN narrative substitutes data for hype. The sensor-fusion library that tamed sunlight glare, the MQTT-over-BLE fallback that bridged cast-iron Wi-Fi shadows, the dual-partition bootloader that made brick-free OTAs mundane, the Grafana–Prometheus–Loki observability stack that pinpointed a motor-ramp regression—each artefact now lives in a starter repository with Terraform blueprints and Helm charts. Forking those assets compresses time-to-MVP from years to quarters, sometimes to weeks, because the lattice of telemetry topics, firmware semantics and mobile gestures has been pressure-tested in more than a million heterogeneous homes across six continents.
SharkNinja’s brand equity certainly mattered, yet the decisive advantage emerged from an architecture that preserved headroom for evolution. The fleet continues to grow: a self-emptying dock shipped last spring, a window-cleaning robot enters beta next quarter, and a lawn device lurks on the roadmap. None of these additions required schema surgery; they simply flipped new capability bits. That continuity underscores the central takeaway: a robot vacuum is a rolling software service whose relevance depends on how elegantly firmware, cloud and mobile instill a sense of effortless control. A-Bots.com specialises in forging that trinity, and the SHARK CLEAN ecosystem stands as living proof on carpets, tiles, and hardwood floors the world over.

5. Partnering for Your Next App: Engagement Models, Compliance Checklists & Future-Proof Roadmap
5.1 Engagement Models: Finding the Tempo That Matches Your Culture
Hardware companies approach software partnerships with wildly different internal cadences. Some teams sprint on tight eight-week industrial-design cycles and need a software catalyst that can run shoulder-to-shoulder, then rotate out; others prefer to outsource the full vertical and focus on supply-chain mastery. A-Bots.com therefore frames collaboration around three deliberately flexible lanes rather than a single procurement template.
Catalyst Sprints condense the riskiest technical unknowns into a ninety-day joint task-force. Your engineers pair with ours to prototype the end-to-end control loop—robot firmware, cloud broker, mobile overlay—until latency budgets and bandwidth envelopes are empirically proven. At the end of the sprint you own working code, a threat model, and a backlog ranked by value versus effort. This lane suits OEMs that already possess embedded talent but need an architectural kick-start.
Co-Creation Pods embed a cross-functional squad—product owner, embedded specialist, cloud SRE, Flutter lead—directly into your roadmap for six to eighteen months. Responsibility is shared: our firmware merges fail if your hardware tests fail, and vice versa. The pod pattern works best when a company wants to retain domain knowledge yet recognises that shipping a companion app every quarter is outside its historical comfort zone.
Turnkey Programs hand the entire digital experience to A-Bots.com under a service-level agreement that guarantees release cadence, uptime, and security posture. Your stakeholders track progress via dashboards and sprint demos while focusing internal resources on plastics, optics, and channel strategy. Turnkey does not mean black-box; source code, CI pipelines, and observability panels live in repositories to which your team has checkpoint access. This lane appeals to firms that need to hit a seasonal retail window and prefer to purchase velocity rather than build it.
The three models share a single constant: transfer of intellectual property is codified so that you exit the engagement with repos, documentation, and build artefacts hosted in your cloud tenancy. In other words, velocity today is not traded for vendor lock-in tomorrow.
5.2 Compliance by Design: Turning Regulation into Competitive Advantage
Regulatory overhead is often perceived as drag, yet mishandled it can torch a launch calendar. A-Bots.com treats compliance not as a post-hoc audit but as a design axis from sprint zero. Every telemetry packet is tagged with a data-classification label that dictates encryption scope and retention policy; backend micro-services enforce those tags via Open Policy Agent, so engineers cannot accidentally persist personally identifiable information in an unsecured table.
At the firmware edge, dual partitioning guards against power loss during over-the-air updates, satisfying UL 2591 safety guidelines without adding exotic hardware. On the cloud side, user-deletion requests mandated by GDPR and CCPA cascade through a directed acyclic graph of linked resources, ensuring that removing an e-mail hash from the identity pod also disassociates telemetry and crash logs without orphaning relational integrity.
International rollouts surface country-specific wrinkles—Korea’s Personal Information Protection Act, India’s CERT-In incident-notification rules, Canada’s PIPEDA opt-in clauses. Rather than crafting ad-hoc patches, our reference architecture isolates jurisdictional variance in policy files versioned alongside code. When Brazil’s LGPD finalised its data-localisation requirement, SharkNinja toggled a single feature flag that routed South-American MQTT traffic through a São Paulo broker cluster with S3 replication restricted to the same region. No mobile-app update, no firmware tweak, no late-night war room.
Compliance discipline becomes visible to consumers as well. Localisation of privacy notices, deterministic time-zones in scheduling, and one-tap export of cleaning logs for home-insurance claims reinforce a sense of product maturity that marketing alone cannot manufacture. In saturated categories, that aura of trust is often the edge that tips a comparison shopper.
5.3 Future-Proof Roadmap: Designing for the Second Product Before the First Ships
Robot-vacuum ecosystems rarely stay mono-product. Docks evolve, companion robots emerge, and strategic acquisitions fold in adjacent form factors. A-Bots.com therefore architects for what we call capability supersets—an ontological model in which every device expresses its skills as versioned flags rather than rigid classes. A vacuum advertises suction, mapping, self-emptying, voice-UX; a window cleaner swaps suction for adhesion and adds vertical-plane safety loop. The mobile client simply renders whatever flags appear, drawing or hiding UI elements without a store-update cycle. Cloud analytics stitch new metrics into dashboards by reading the same flags.
Adaptive road-mapping extends to machine-learning infrastructure. Navigation policies improve when vision models are fine-tuned on regional floor textures and pet types, but shipping one-gigabyte checkpoints to every robot is untenable. Our federated-learning service trains edge models in bursts while users sleep, then uplinks compressed gradient deltas to the cloud for aggregation. Firmware downloads only the pruned layers it needs; battery impact remains within the nightly charge buffer. The result is a fleet that self-optimises for parquet in Paris and high-pile rugs in Toronto without fragmenting into region-locked SKUs.
From a product-strategy angle, future proofing also involves commerce hooks that can evolve beyond hardware sales. Sharks’ app began with spare-parts prompts keyed to vibration analytics; eighteen months later the same secure-checkout module hosts subscription plans for hypoallergenic filters delivered quarterly. Because payment tokens were abstracted behind PCI-compliant micro-services from day one, adding the new SKU line took three sprints, not a quarter.
5.4 Kickoff Blueprint: From NDA to First Prototype in Eight Weeks
Speed matters when retail windows and competitive leaks create external pressure. A-Bots.com’s kickoff blueprint compresses the distance between handshake and on-device demo into roughly eight weeks.
- Week 1: Joint discovery workshop translates marketing promises into measurable latency, battery and compliance budgets. Firmware logging hooks are instrumented on your engineering samples before they leave the lab.
- Weeks 2–4: Catalyst squad deploys a cloud sandbox with broker, observability and policy agents. First SLAM and telemetry packets appear in Grafana alongside synthetic load tests.
- Weeks 5–6: Mobile skeleton in Flutter renders a live map and executes start/stop commands under the target round-trip time. OTA agent proves end-to-end by flashing a non-functional “hello-world” image and rolling back.
- Weeks 7–8: Edge-case sweeps—low-light navigation, Wi-Fi dropout, multi-home timezone jitter—are run in parallel test apartments. Findings crystalise into a backlog triaged by risk. The demo robot now performs a full cleaning run, surfaces in the app, and updates its firmware overnight without human intervention.
By the close of week eight your executive team reviews a live device that embodies the architectural guardrails, not a slide deck of intentions. From there, choosing between catalyst exit, pod extension or turnkey escalation becomes a data-driven decision rather than a leap of faith.
A robot vacuum may spend its life beneath sofas, but the strategic lift that launches it comes from systems that span silicon to cloud and back—systems A-Bots.com delivers as a repeatable craft. Whether your roadmap points to a flagship vacuum, a family of companion cleaners or an entirely different robotic form factor, partnering early and architecting for tomorrow ensures that each firmware commit, compliance audit and user interaction compounds value instead of accruing technical debt. In that compounding lies the durable differentiation that keeps customers loyal long after the novelty of autonomous cleaning fades into everyday convenience.

✅ Hashtags
#RobotVacuum
#AppDevelopment
#SmartHome
#IoT
#SLAM
#OTAFirmware
#ABots
#MobileApps
Other articles
Custom Mobile App Development for Smart Wine Cabinets Smart wine cabinets are revolutionizing how wine is stored, served, and experienced. But without a tailored mobile app, their potential remains untapped. This article explores how custom app development turns connected appliances into lifestyle platforms. From inventory tracking and AI-powered recommendations to enterprise-grade restaurant integrations, the right app changes everything. We cover technical architecture, design principles, and real-world use cases. Whether you're a wine lover, hotelier, or hardware brand, you'll discover why mobile UX is now core to wine storage. A-Bots.com delivers expert, future-ready solutions tailored to this niche.
Custom Mobile App Development for Window-Cleaning Robots Window-cleaning robots are moving from novelty to necessity as glass facades dominate modern architecture. But hardware alone cannot deliver safety, efficiency, or user trust. This article explains why a powerful mobile app—built for AI navigation, cloud analytics, and multi-device control—is now the true differentiator. We track a market expected to surpass $1.5 billion, analyze leading models, and expose the gaps in off-the-shelf software. You’ll see how custom apps cut maintenance costs, unlock fleet-level dashboards, and turn sensor data into product vision. The technical deep-dive shows exactly how BLE, Wi-Fi, and OTA updates converge inside a secure, scalable stack. If you manufacture cleaning robots, the path to premium positioning starts with smarter software.
Aerial Photography Mapping Software The article dissects a full-stack journey from flight data capture to enterprise roll-out of an aerial mapping platform. Readers learn why sensor stacks and RTK/PPK workflows matter, how AI boosts SfM and MVS speed, and what Kubernetes-driven GPU architecture keeps terabytes of imagery flowing on schedule. Real-world benchmarks, ISO-aligned security controls and an 18-week go-live roadmap show decision-makers exactly how A-Bots.com transforms proof-of-concept scripts into production-grade geospatial intelligence—with zero vendor lock-in and measurable carbon savings.
Smart Solar and Battery Storage App Solar panels and batteries are cheaper than ever, but real value emerges only when software choreographs them minute by minute. This in-depth article tracks the cost curves reshaping residential energy, explains the app architecture that forecasts, optimises and secures every dispatch, and unpacks the grid-service markets that now pay households for flexibility. Packed with field data—from NREL bill-savings trials to Tesla’s 100 000-home virtual power plant—it quantifies user ROI across savings, resilience and sustainability. The final section details why A-Bots.com is uniquely positioned to deliver such platforms, fusing AI forecasting, IEC-grade cybersecurity and award-winning UX into a turnkey solution. Whether you build hardware, aggregate DERs or own a solar roof, discover how intelligence—not silicon—unlocks the next decade of energy value.
Augmented-Reality Maintenance Apps for Cobots Industrial cobots are the future of automation, but servicing them efficiently remains a challenge. This article explores how Augmented-Reality maintenance apps, powered by IoT and AI integration, dramatically reduce downtime, costs, and errors. Discover real-world case studies, data-driven insights, and why partnering with A-Bots.com can future-proof your maintenance operations with cutting-edge AR solutions.
Sensor-Fusion eBike App Development Company Looking to leapfrog the competition with a data-driven eBike? A-Bots.com is the specialist app development company that fuses strain-gauge torque, dual-band GNSS and UWB security into a seamless mobile experience. From adaptive pedal-assist curves and crash detection to predictive battery RUL dashboards, our end-to-end stack—bike ECU, Kotlin / Swift apps and AWS serverless back-end—turns raw telemetry into rider delight and recurring revenue. Partner with a single-SLA team that prototypes in weeks, scales to global fleets and safeguards compliance in every jurisdiction.
Top stories
Copyright © Alpha Systems LTD All rights reserved.
Made with ❤️ by A-BOTS